Exploració per tema "Vehicles autònoms"
Ara es mostren els items 41-60 de 279
-
Autonomous driving: a bird's eye view

(2019-04)
(2019-04)
Article
Accés obertThe introduction of autonomous vehicles (AV) will represent a milestone in the evolution of transportation and personal mobility. AVs are expected to significantly reduce accidents and congestion, while being economically ... -
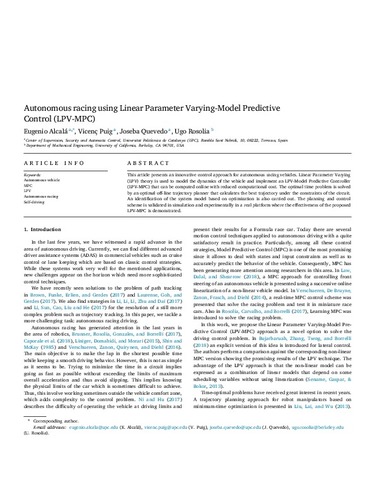
Autonomous racing using Linear Parameter Varying-Model Predictive Control (LPV-MPC)
(2020-02-01)
Article
Accés obertThis article presents an innovative control approach for autonomous racing vehicles. Linear Parameter Varying (LPV) theory is used to model the dynamics of the vehicle and implement an LPV-Model Predictive Controller ... -
Autonomous vehicle fleets for public transport: scenarios and comparisons
(Elsevier, 2022-12)
Article
Accés obertAutonomous vehicles (AVs) are becoming a reality and may integrate with existing public transport systems to enable the new generation of autonomous public transport. It is vital to understand what are the alternatives for ... -
Autonomous vehicle localization using state estimation techniques
(Universitat Politècnica de Catalunya, 2020-07-15)
Projecte Final de Màster Oficial
Accés obertRecently, industrialized countries carry out a technological race towards autonomous driving. The current commercial driver assistant systems are limited to aiding the driver while the driver is responsible for overall ... -
Autonomous vehicle navigation with deep reinforcement learning
(Universitat Politècnica de Catalunya, 2019-05-20)
Projecte Final de Màster Oficial
Accés obertThe irruption of Autonomous Vehicles in transportation sector is unstoppable. However, the tran-sition from conventional vehicles to Autonomous Vehicles will not happen from one day to theother, instead, it will be a process ... -
Autonomous vehicle state estimation and mapping using Takagi–Sugeno modeling approach
(Multidisciplinary Digital Publishing Institute (MDPI), 2022-04-28)
Article
Accés obertThis paper proposes an optimal approach for state estimation based on the Takagi–Sugeno (TS) Kalman filter using measurement sensors and rough pose obtained from LIDAR scan end-points matching. To obtain stable and optimal ... -
Autonomous vehicles: are they really so appealing?
(Universitat Politècnica de Catalunya, 2023-06-28)
Projecte Final de Màster Oficial
Accés obertL'objectiu d'aquest projecte és investigar les actituds i les percepcions de les persones sobre l'ús de vehicles autònoms i determinar els factors que influeixen en la seva disposició a utilitzar-los. Per això s'ha realitzat ... -
Autonomous vehicles: theoretical and practical challenges
(Elsevier, 2018)
Article
Accés obertAutonomous driving is expected to revolutionize road traffic attenuating current externalities, especially accidents and congestion. Carmakers, researchers and administrations have been working on autonomous driving for ... -
Autonomous vehicles’ motion control based on invariant sets approach
(Universitat Politècnica de Catalunya, 2022-07-26)
Projecte Final de Màster Oficial
Accés obert -
Avoiding instabilities in short gap car-followings with connected autonomous vehicles
(Universitat Politècnica de Catalunya, 2023-02-09)
Treball Final de Grau
Accés obertThe image of driverless vehicles cruising on highways has been coming closer to reality over the last years thanks to the constant investigations in the technologies used in Connected and Automated Vehicles (CAV). Platooning ... -
Benefits of autonomous driving in traffic flow using SUMO

(Universitat Politècnica de Catalunya, 2018-01-18)
(Universitat Politècnica de Catalunya, 2018-01-18)
Treball Final de Grau
Accés restringit per acord de confidencialitat -
BRASIL: A high-integrity GPGPU toolchain for automotive systems
(Institute of Electrical and Electronics Engineers (IEEE), 2019)
Text en actes de congrés
Accés obertEmbedded General Purpose Graphics Processing Units (GPGPUs) are increasingly used in automotive to enable Advanced Driving Assistance (ADAS) and Autonomous driving. However, their functional safety certification has been ... -
Capacity of a freeway lane with platoons of autonomous vehicles mixed with regular traffic
(2021-05)
Article
Accés obertIn the near future, autonomous vehicles (AVs) will travel sharing the current freeways with human driven vehicles. The efficiency of this mixed traffic scenario will depend on the ability of AVs to behave cooperatively. ... -
CARACTERIZACIÓN DE POSICIONAMIENTO EN EL MEDIO MARINO MEDIANTE MÉTODOS ACÚSTICOS
(2017)
Comunicació de congrés
Accés obertEn la actualidad se realizan numerosos estudios en el medio marino, muchos de ellos utilizan vehículos que se desplazan por el fondo marino. En este entorno los sistemas de posicionamiento por satélite no son operativos ... -
Characterizing self-driving tasks in general-purpose architectures
(European Network of Excellence on High Performance and Embedded Architecture and Compilation (HiPEAC), 2021-09-15)
Capítol de llibre
Accés obertAutonomous Vehicles (AVs) have the potential to radically change the automotive industry. How- ever, computing solutions for AVs have to meet severe performance constraints to guarantee a safe driving experience. Current ... -
CleanET: enabling timing validation for complex automotive systems
(Association for Computing Machinery (ACM), 2020)
Text en actes de congrés
Accés obertTiming validation for automotive systems occurs in late integration stages when it is hard to control how the instances of software tasks overlap in time. To make things worse, in complex software systems, like those for ... -
Coche autónomo de Raspberry Pi basado en sensores y visión por computador y investigación sobre conducción automática en parte control
(Universitat Politècnica de Catalunya, 2022-01)
Projecte Final de Màster Oficial
Accés restringit per decisió de l'autorEn resumen, la tecnología de conducción autónoma es: los vehículos autónomos pueden detectar su entorno con tecnologías como el radar, el radar óptico, el GPSylavisión por computadora. El sistema de control avanzado puede ... -
Collaborative perception architecture in smart cities
(Universitat Politècnica de Catalunya, 2023-04-25)
Projecte Final de Màster Oficial
Accés obert
Realitzat a/amb: Fraunhofer-Institut für Kognitive Systeme IKSAutonomous Driving Systems have become a reality in our society. Everyday, progress is made to increase vehicles' autonomy to drive without restrictions in roads and cities. To achieve that, researchers are always seeking ... -
Comparison of two non-linear model-based control strategies for autonomous vehicles
(Institute of Electrical and Electronics Engineers (IEEE), 2016)
Text en actes de congrés
Accés obertThis paper presents the comparison of two nonlinear model-based control strategies for autonomous cars. A control oriented model of vehicle based on a bicycle model is used. The two control strategies use a model reference ... -
Comprehensive IoT-driven fleet management system for industrial vehicles
(Institute of Electrical and Electronics Engineers (IEEE), 2023)
Article
Accés obertIn the context of fleet management, various challenges, including equipment breakdowns, rising maintenance costs, inefficient resource utilization, and outdated telematics systems, necessitate a transformative approach. ...