

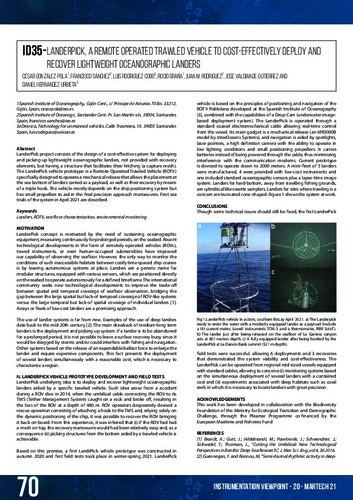
LanderPick, a remote operated trawled vehicle to cost-effectively deploy and recover lightweight oceanographic landers
Visualitza/Obre
Tipus de documentArticle
Data publicació2021
EditorSARTI
Condicions d'accésAccés obert

Llevat que s'hi indiqui el contrari, els
continguts d'aquesta obra estan subjectes a la llicència de Creative Commons
:
Reconeixement-NoComercial-SenseObraDerivada 3.0 Espanya
Abstract
CitacióGonzález Pola, C.; Sánchez Delgado, F. LanderPick, a remote operated trawled vehicle to cost-effectively deploy and recover lightweight oceanographic landers. 9th International Workshop on Marine Technology (MARTECH 2021)". ""Instrumentation Viewpoint", 2021, núm. 21, p. 70-71.
Dipòsit legalB.32814-2006
ISSN1886-4864
Col·leccions
| Fitxers | Descripció | Mida | Format | Visualitza |
|---|---|---|---|---|
| ID_35_MARTECH ... ON VIEWPOINT_corregido.pdf | Article | 603,9Kb | Visualitza/Obre |