

Mostra el registre d'ítem simple
Autonomous racing using Linear Parameter Varying-Model Predictive Control (LPV-MPC)
| dc.contributor.author | Alcalá Baselga, Eugenio |
| dc.contributor.author | Puig Cayuela, Vicenç |
| dc.contributor.author | Quevedo Casín, Joseba Jokin |
| dc.contributor.author | Rosolia, Ugo |
| dc.contributor.other | Universitat Politècnica de Catalunya. Departament d'Enginyeria de Sistemes, Automàtica i Informàtica Industrial |
| dc.date.accessioned | 2021-02-25T09:10:30Z |
| dc.date.available | 2022-02-01T01:26:30Z |
| dc.date.issued | 2020-02-01 |
| dc.identifier.citation | Alcala, E. [et al.]. Autonomous racing using Linear Parameter Varying-Model Predictive Control (LPV-MPC). "Control engineering practice", 1 Febrer 2020, vol. 95, núm. 104270, p. 1-8. |
| dc.identifier.issn | 0967-0661 |
| dc.identifier.uri | http://hdl.handle.net/2117/340478 |
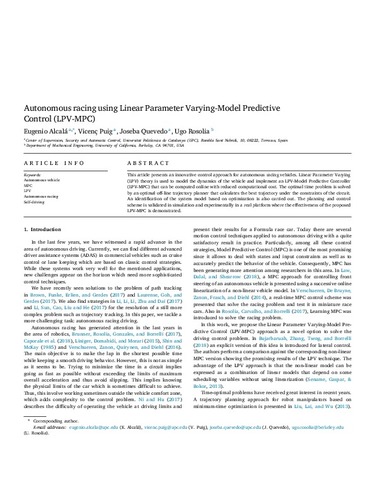
| dc.description.abstract | This article presents an innovative control approach for autonomous racing vehicles. Linear Parameter Varying (LPV) theory is used to model the dynamics of the vehicle and implement an LPV-Model Predictive Controller (LPV-MPC) that can be computed online with reduced computational cost. The optimal time problem is solved by an optimal off-line trajectory planner that calculates the best trajectory under the constraints of the circuit. An identification of the system model based on optimization is also carried out. The planning and control scheme is validated in simulation and experimentally in a real platform where the effectiveness of the proposed LPV-MPC is demonstrated. |
| dc.format.extent | 8 p. |
| dc.language.iso | eng |
| dc.rights | Attribution-NonCommercial-NoDerivs 3.0 Spain |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-nd/3.0/es/ |
| dc.subject | Àrees temàtiques de la UPC::Informàtica::Automàtica i control |
| dc.subject.lcsh | Predictive control |
| dc.subject.lcsh | Autonomous vehicles |
| dc.subject.lcsh | Automatic control |
| dc.title | Autonomous racing using Linear Parameter Varying-Model Predictive Control (LPV-MPC) |
| dc.type | Article |
| dc.subject.lemac | Control predictiu |
| dc.subject.lemac | Vehicles autònoms |
| dc.subject.lemac | Control automàtic |
| dc.contributor.group | Universitat Politècnica de Catalunya. SAC - Sistemes Avançats de Control |
| dc.identifier.doi | 10.1016/j.conengprac.2019.104270 |
| dc.relation.publisherversion | https://www.sciencedirect.com/science/article/abs/pii/S0967066119302187 |
| dc.rights.access | Open Access |
| local.identifier.drac | 27009224 |
| dc.description.version | Postprint (updated version) |
| local.citation.author | Alcala, E.; Puig, V.; Quevedo, J.; Rosolia, U. |
| local.citation.publicationName | Control engineering practice |
| local.citation.volume | 95 |
| local.citation.number | 104270 |
| local.citation.startingPage | 1 |
| local.citation.endingPage | 8 |
Fitxers d'aquest items
Aquest ítem apareix a les col·leccions següents
-
Articles de revista [1.397]
-
Articles de revista [509]