Exploració per tema "Avions no tripulats -- Control automàtic"
Ara es mostren els items 1-15 de 15
-
A robust predictive control for a Quadrotor with an Airsoft-marker

(Universitat Politècnica de Catalunya, 2018-04-27)
(Universitat Politècnica de Catalunya, 2018-04-27)
Projecte Final de Màster Oficial
Accés obertThis project is part of a more ambitious European project which consists on the autonomous inspection of petrol pipes. This inspection is done using a custom design drone equipped with a direction system, called gimbal, ... -
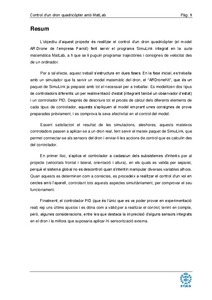
Control d’un dron quadricòpter amb MatLab
(Universitat Politècnica de Catalunya, 2016-04)
Projecte/Treball Final de Carrera
Accés obert
Realitzat a/amb: ParrotL’objectiu d’aquest projecte és realitzar el control d’un dron quadricòpter (el model AR.Drone de l’empresa Parrot) fent servir el programa SimuLink integrat en la suite matemàtica MatLab, a fi que se li puguin programar ... -
Controlling a Quadrotor with a Robotic Arm using Nonlinear Model Predictive Control
(Universitat Politècnica de Catalunya, 2015-01)
Projecte Final de Màster Oficial
Accés obertThis thesis designs a method to control a quadrotor equipped with a robotic arm. The arm has been developed in Institut de Rob otica i Inform atica Industrial (CSIC-UPC), namely here IRI. During the project, an algorithm ... -
Development of an automatic guiding system for builder drones
(Universitat Politècnica de Catalunya, 2020-07-28)
Projecte Final de Màster Oficial
Accés obert
Realitzat a/amb: Université Catholique de LouvainBuilder drones have the potential of aiding in construction sites by picking up and depositing masonry units. However, their accuracy is restrained due to drifting, wind and the uncertainty of positioning methods such as ... -
Estudi i aplicació de tècniques de control robust a la navegació d’un quadrotor
(Universitat Politècnica de Catalunya, 2018-01-10)
Treball Final de Grau
Accés obertEn aquest estudi es parteix d’un treball ja realitzat amb un vehicle aeri no tripulat o Dron quadrotor [9] governat per la seva sensòrica de posició, velocitat, acceleracio´ i ca`mara de vídeo, i programat amb eines com ... -
Estudi per a la fusió de dades de posició i actitud en un multirotor AscTec Hummingbird
(Universitat Politècnica de Catalunya, 2015-10)
Treball Final de Grau
Accés obertEstudi dels protocols de comunicació de dispositius GPS convencionalsEstudi del software de control del Hummingbird, apartat de lectura de sensorsIntegració del MB100 i modificació del software si convéEstudi del software ... -
Gain-scheduling Control of a Quadrotor using the Takagi-Sugeno Approach
(Universitat Politècnica de Catalunya, 2016-06-08)
Projecte Final de Màster Oficial
Accés obertIn this thesis, a Takagi-Sugeno model for an Attitude/Altitude model of a quadrotor system is developed. With this Takagi-Sugeno model, a gain-scheduling state-feedback controller, as well as a state observer, have been ... -
Icing detection in unmanned aerial vehicles with longitudinal motion using an LPV unknown input observer
(Institute of Electrical and Electronics Engineers (IEEE), 2015)
Text en actes de congrés
Accés obertThis paper proposes a linear parameter varying (LPV) unknown input observer for the diagnosis of actuator faults and icing in unmanned aerial vehicles (UAVs). The accretion of ice layers on wings and control surfaces ... -
LPV Control of a Quadrotor
(Universitat Politècnica de Catalunya, 2015-03)
Projecte Final de Màster Oficial
Accés obertThis master thesis addresses the LPV control of a quadrotor system. The quadorotor model is first transformed to a LPV model respresentation starting from the nonlinear physical model. Then, using the LPV gain-scheduling ... -
LPV predictive control of a quadrotor
(Universitat Politècnica de Catalunya, 2020-05-18)
Projecte Final de Màster Oficial
Accés obert -
Modeling and identification of a quadrotor using LPV techniques
(Universitat Politècnica de Catalunya, 2014-07-15)
Projecte Final de Màster Oficial
Accés obertThe aim of this project is to modelize a LPV model and to compare different identification methods. In order to accomplish that, first of all a white box model of the quadrotor has been provided. This model has been used ... -
Modelling and control of a customized drone with gimbal-attachment
(Universitat Politècnica de Catalunya, 2019-01-17)
Projecte Final de Màster Oficial
Accés obertThis Master thesis discusses how to obtaining a accurate nonlinear model of a cus-tomized quadcopter with gimbal attachment in order to control such with a nonlinearmodel predictive controller. This approach uses a state ... -
Modelling and control of a quadrotor

(Universitat Politècnica de Catalunya / Zhejiang University, 2013)
(Universitat Politècnica de Catalunya / Zhejiang University, 2013)
Projecte/Treball Final de Carrera
Accés restringit per decisió de l'autorThe aim of this project is to model and control a quadrotor. The project starts introducing the quadrotor and its parts. After that, the project provides the modelling of the dynamics of the quadrotor using the Lagrange-Euler ... -
Nonlinear Model Predictive Control of a Quadrotor
(Universitat Politècnica de Catalunya, 2016-09-05)
Projecte Final de Màster Oficial
Accés obertOne of the most important features of a quadrotor in order to properly work, generally in some sort of path tracking, is to have a suitable control. This thesis will approach the problem of controlling a quadrotor applying ... -
Real-time video stabilization without phantom movements for micro aerial vehicles
(2014-09-22)
Article
Accés obertIn recent times, micro aerial vehicles (MAVs) are becoming popular for several applications as rescue, surveillance, mapping, etc. Undesired motion between consecutive frames is a problem in a video recorded by MAVs. There ...