Exploració per tema "Vehicles, Remotely piloted"
Ara es mostren els items 21-40 de 43
-
Estudio, diseño y construcción de un hovercraft por control remoto de 0,63 metros de eslora

(Universitat Politècnica de Catalunya, 2016-07)
(Universitat Politècnica de Catalunya, 2016-07)
Treball Final de Grau
Accés obert -
Evaluation of RPAS separation conflict geometries
(Universitat Politècnica de Catalunya, 2015-05-29)
Treball Final de Grau
Accés obertThis project will study and evaluate the impact of introducing an RPAS (Remotely Piloted Aircraft Systems) in non-segregated airspace scenario. The computation of the impact has a direct relation with the existing separation ... -
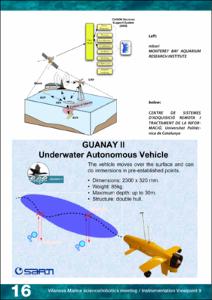
Guanay II underwater autonoumus vehicle
(2010-10-01)
Article
Accés obert -
Hydrodynamic model, simulation and linear control for cormoran-auv

(Antoni Mànuel, 2011-11-01)
(Antoni Mànuel, 2011-11-01)
Article
Accés restringit per política de l'editorial -
Improving visual odometry for AUV navigation in marine environments
(SARTI, 2021)
Article
Accés obertVisual odometry is usually integrated in the localization and control modules of underwater robots, combined with other data coming from diverse instruments and sensors, such as, Doppler Velocity Logs (DVL), pressure sensors ... -
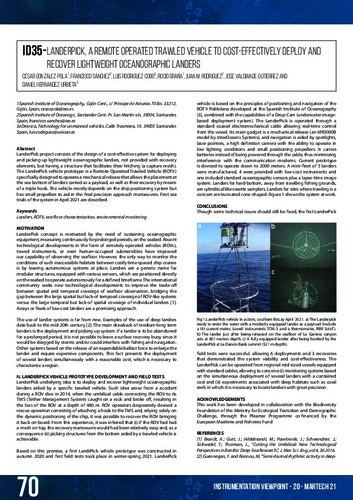
LanderPick, a remote operated trawled vehicle to cost-effectively deploy and recover lightweight oceanographic landers
(SARTI, 2021)
Article
Accés obertLanderPick project consists of the design of a cost-efective system for deploying and picking-up lightweight oceanographic landers, not provided with recovery elements, but having a structure that facilitates their hitching ... -
Linear control design for a path planning of AUV-Cormoran
(2010-12-01)
Article
Accés obertThis work shows a linearization for a AUV-Cormoran dynamic mathematical model with the aim of designing linear controllers for trajectory control. The model is developed under 3 degrees of freedom and the whole system ... -
Long-term monitoring of pelagic biodiversity in the NE-Pacific: a new program based on vertical ROV video surveys during NEPTUNE observatory maintenance expeditions
(2019)
Comunicació de congrés
Accés obertActes demanades a l'autor (07/05/2020 manel) -
Machine to Measure the Characteristics of the Dampers of a Radio Control Vehicle
(Universitat Politècnica de Catalunya, 2020-09-04)
Projecte Final de Màster Oficial
Accés obert -
Object detection with drone (Tello and TelloEDU)
(Universitat Politècnica de Catalunya, 2023-07-05)
Projecte Final de Màster Oficial
Accés restringit per acord de confidencialitatThe main goal of this project is to analyze technologies that can be useful for implementing a program for a drone to follow a car -
Obstacle detection algorithm of low computational cost for Guanay II AUV
(SARTI, 2016)
Comunicació de congrés
Accés obertObstacle detection is one of the most important stages in the obstacle avoidance system. This work is focused to explain the operation of a designed and implemented for the overall detection of objects with low computational ... -
Omnidirectional underwater surveying and telepresence
(SARTI, 2016)
Comunicació de congrés
Accés obertExploratory dives are traditionally the first step for marine scientists to acquire information on a previously unknown area of scientific interest. Manned submersibles have been the platform of choice for such exploration, ... -
Plataforma mòbil terrestre per al seguiment d'objectes mitjançant visió estereoscòpica.
(Universitat Politècnica de Catalunya, 2015-06)
Treball Final de Grau
Accés restringit per decisió de l'autor -
Power system of the Guanay II AUV
(2015-02-10)
Article
Accés obertGuanay II is an autonomous underwater vehicle (AUV) designed to perform measurements in a water column. In this paper the aspects of the vehicle’s power system are presented with particular ... -
Projecte de disseny mecànic i electrònic d'un cotxe teledirigit
(Universitat Politècnica de Catalunya, 2023-01-11)
Treball Final de Grau
Accés obertL'objectiu d'aquest projecte és la de dissenyar la part mecànica i electrònica d'un cotxe teledirigit. En la part mecànica, fer el disseny 3D del cotxe i els càlculs pertinents de la transmissió. En el cas de la part ... -
Proposing a unique altitude/height service for the Unmanned Traffic Management
(Universitat Politècnica de Catalunya, 2019-02-15)
Treball Final de Grau
Accés obertOn this final degree project, it will be discussed the problems associated with integrating Unmanned Aircraft Systems (UAS), including Remotely-Piloted Aircraft Systems (RPAS), into the airspace. The different problems as ... -
Risk benefit framework for using unmanned systems in industrial operations
(Universitat Politècnica de Catalunya / University of Alberta, 2013)
Treball Final de Grau
Accés restringit per decisió de l'autor
Realitzat a/amb: University of AlbertaOur environment is constantly being threatened by human activity. Global warming and wildlife extinction, for example, are some of the consequences of our daily routine, which at the same time is also the cause of Earth ... -
Smart boat : Creació d'un sistema de monitorització de control a distància mitjançant una aplicació mòbil (app) per una embarcació d'esbarjo
(Universitat Politècnica de Catalunya, 2017-01)
Treball Final de Grau
Accés obert -
Smart sensing interoperability platforms in the scope of Atlantos
(SARTI, 2018)
Article
Accés obertThis paper aims to demonstrate the capabilities of a Smart Cable which aims to convert any commercial non-PUCK-enabled sensor in a Smart PUCK-enabled device. Through this development, it can be easily integrated on a sensor ... -
Supervisory control interface design for unmanned aerial vehicles through GEDIS-UAV
(2013-07-26)
Capítol de llibre
Accés restringit per política de l'editorialThis paper reflects the state of art in the field of human factors for unmanned aerial vehicles. It describes the GEDIS-UAV guide, which is a mod- ification of the GEDIS guide. It also shows the evaluation of the ...