Exploració per tema "Robots -- Programació"
Ara es mostren els items 21-40 de 71
-
Desenvolupament d'un entorn de simulació evolutiu per a una instal·lació multi-robot

(Universitat Politècnica de Catalunya, 2009-03-31)
(Universitat Politècnica de Catalunya, 2009-03-31)
Projecte/Treball Final de Carrera
Accés obertL’objectiu d’aquest projecte és demostrar la validesa de la utilització de tècniques de simulació en ordinador, així com d’algorismes d’evolució genètica, per tal de trobar solucions òptimes en la programació dels robots ... -
Design and construction of small autonomous robots
(Universitat Politècnica de Catalunya, 2016-02-04)
Treball Final de Grau
Accés obertThe goal of the project was to design and build small and autonomous robots that could communicate with each other and recognize their environment. -
Design obstacle detection system for AUV Guanay II
(2015)
Text en actes de congrés
Accés obertThe autonomous underwater vehicles (AUV) carry out inspection missions and intervention on known and unknown environments, where it is important to ensure their safety. The ability for obstacle detection and their ... -
Design of an omni wheel transporter robot : Base Stage
(Universitat Politècnica de Catalunya, 2023-07-04)
Treball Final de Grau
Accés obertThis Bachelor's Thesis presents the theoretical study, design, and implementation of the Bot, a robot capable of performing package deliveries on elevated surfaces. The control of this robot can be done in real-time through ... -
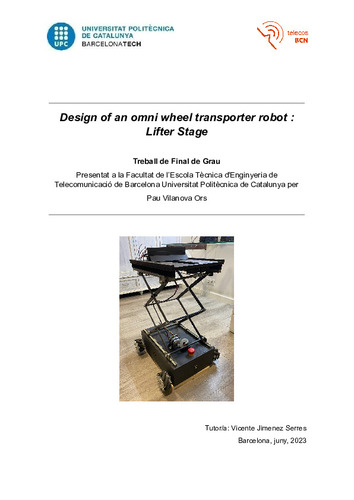
Design of an omni wheel transporter robot: Lifter Stage
(Universitat Politècnica de Catalunya, 2023-07-07)
Treball Final de Grau
Accés obertThe project aims to improve a robot that moves with mecanumwheels by adding electronics of distance sensors VL53L0X, Bluetooth communication to control it with an application, and designing a PCB for electronic components ... -
Development of the model predictive controller and simultaneous-localization-and-mapping algorithm of the control system
(Universitat Politècnica de Catalunya, 2021-06)
Treball Final de Grau
Accés obert
Realitzat a/amb: BCN eMOTORSPORTThis thesis aims to develop and implement two algorithms to control the first and fastest Spanish Formula Student Driverless (FSD) car and an algorithm to solve its localization and mapping problem. This project is within ... -
Disseny d'una cèl·lula de treball robotitzada que utilitzarà un robot industrial ASEA IRB 120
(Universitat Politècnica de Catalunya, 2011)
Projecte/Treball Final de Carrera
Accés obertEn el present document es pot trobar tota la informació necessària per a la posta en marxa d’una cèl·lula robòtica tant a nivell de software (mitjançant el programa RobotStudio) com de hardware que utilitzarà un robot ... -
Disseny d’una cèl·lula robòtica d’inspecció
(Universitat Politècnica de Catalunya, 2018-06-21)
Projecte Final de Màster Oficial
Accés obert
Realitzat a/amb: ABBL’objectiu del projecte és el de realitzar el disseny d’una cèl·lula robotitzada que ha de realitzar tasques d’inspecció. L’empresa que ha comprat la cèl·lula és una companyia sueca que fabrica peces de carrosseria de camió ... -
Disseny i implementació de dos braços robòtics que treballen conjuntament en la mesura de peces 3D

(Universitat Politècnica de Catalunya, 2020-06-22)
(Universitat Politècnica de Catalunya, 2020-06-22)
Treball Final de Grau
Accés restringit per decisió de l'autor
Realitzat a/amb: Aira RoboticsEn aquest projecte veurem la implementació de dos braços robòtics coordinats que treballen conjuntament en la mesura de peces 3D. Per aconseguir aquest muntatge, s’ha dividit la feina en dos treballs de final de grau. ... -
Disseny, programació i implementació d'un robot de dibuix amb Arduino
(Universitat Politècnica de Catalunya, 2017-06-15)
Projecte Final de Màster Oficial
Accés obertL'objectiu d'aquest treball és dissenyar i construir un robot capaç de traspassar un dibuix tècnic realitzat amb ordinador, des d'un arxiu SVG per exemple, a un dibuix real sobre una superfície plana. En aquests estudi es ... -
Estudi i implementació d'una aplicació robotitzada d'air hockey i del seu entorn
(Universitat Politècnica de Catalunya, 2014-06-26)
Treball Final de Grau
Accés obertAquest document descriu la feina desenvolupada al llarg del projecte juntament amb la descripció de les diverses parts estudiades. A més dels resultats finals s’inclou tota la part de simulació i desenvolupament del ... -
Estudi i implementació de diferents algorismes sobre un robot mòbil amb “ROS (Robot Operating Systems)” en entorns educatius
(Universitat Politècnica de Catalunya, 2022-05-19)
Treball Final de Grau
Accés obertProjecte que planteja l'execució experimental del robot TurtleBot3 Burger i la tecnologia ROS de cara a les pràctiques de l'assignatura Mobile Robots impartida pel departament d'automàtica i control de l'ESEIAAT. Adaptar ... -
Estudio de las etapas de automatización de una aplicación industrial basada en la gestión y transporte de paquetes
(Universitat Politècnica de Catalunya, 2020-06)
Treball Final de Grau
Accés obertEn este proyecto sea ha realizado la simulación de un proceso industrial de paquetes en el laboratorio de la Universidad Politécnica de Cataluña, Terrassa. El proceso industrial está formado por cinco estaciones de trabajo ... -
Estudio, implementación y supervisión de un proceso robotizado y sistemas de supervisión
(Universitat Politècnica de Catalunya, 2023-02-03)
Projecte Final de Màster Oficial
Accés obertEl objetivo del presente proyecto refiere a la programación de un robot colaborativo modelo UR3 de la marca Universal Robots, y la integración de este mismo con sistemas de supervisión. El robot debe tener la capacidad de ... -
Evaluate and correct robot actions using EEG signals
(Universitat Politècnica de Catalunya, 2018)
Projecte Final de Màster Oficial
Accés restringit per decisió de l'autor
Realitzat a/amb: Nagaoka Gijutsu Kagaku Daigaku -
Exoesqueleto para el movimiento de los dedos de una mano
(Universitat Politècnica de Catalunya, 2008-06-30)
Projecte/Treball Final de Carrera
Accés obert -
Implementació d'un sistema PLC multiplataforma per maqueta de classificació cromàtica
(Universitat Politècnica de Catalunya, 2016-10)
Treball Final de Grau
Accés restringit per decisió de l'autor
Realitzat a/amb: Institut LacetàniaEl present projecte es realitza amb la col·laboració de l’institut Lacetània de Manresa, aprofitant l’avinentesa que el director del projecte és professor del centre i que en vaig ser alumne durant dos anys, cursant el ... -
Influence of the privacy issue in the deployment and design of networking robots in European urban areas
(2010)
Article
Accés obertIn this article we analyze how the privacy issue will affect in the deployment and design of Networking Robots in European urban areas. Privacy means the way to guarantee self control on private data that can be processed ... -
Kinematic and dynamic study of a quadruped robot
(Universitat Politècnica de Catalunya, 2024-01-11)
Projecte Final de Màster Oficial
Accés obertEls robots amb potes són cada cop més comuns tant en àmbits de recerca com aplicacions industrials. Les màquines d'aquest tipus són capaces d'arribar a llocs no aptes per a humans i on vehicles amb rodes no poden accedir. ... -
La influencia del efecto "Uncanny Valley" en el diseño de un robot social
(2010)
Text en actes de congrés
Accés obertIn this present work we propose which features and functionalities we should consider in the design of social robots according to the “Uncanny Valley” effect. This effect, described in the 70s, argues that when robots have ...