Exploració per tema "Interacció persona-robot"
Ara es mostren els items 21-40 de 53
-
Human to robot whole-body motion transfer

(Institute of Electrical and Electronics Engineers (IEEE), 2021)
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Text en actes de congrés
Accés obertTransferring human motion to a mobile robotic manipulator and ensuring safe physical human-robot interaction are crucial steps towards automating complex manipulation tasks in human-shared environments. In this work, we ... -
Human-robot collaborative multi-agent path planning using Monte Carlo tree search and social reward sources
(2021)
Text en actes de congrés
Accés obertThe collaboration between humans and robots in an object search task requires the achievement of shared plans obtained from communicating and negotiating. In this work, we assume that the robot computes, as a first step, ... -
Human-robot Interface based on Stretchable sensors

(Universitat Politècnica de Catalunya, 2020-09-07)
(Universitat Politècnica de Catalunya, 2020-09-07)
Projecte Final de Màster Oficial
Accés restringit per decisió de l'autor
Realitzat a/amb: Inch'ŏn TaehakkyoSince their conception, robots have been created to help human beings in their work and daily tasks, gradually becoming an important part of the technological society. Today, robots are involved in many areas of people's ... -
Improved task planning through failure anticipation in human-robot collaboration
(2022)
Text en actes de congrés
Accés obertThe human state is defined in terms of capacity, knowledge and motivation. The system has been implemented in a standardised environment using the Planning Domain Definition Language (PDDL) and the modular ROSPlan framework, ... -
Improving human-robot interaction effectiveness in human-robot collaborative object transportation using force prediction
(Institute of Electrical and Electronics Engineers (IEEE), 2023)
Text en actes de congrés
Accés restringit per política de l'editorialIn this work, we analyse the use of a prediction of the human’s force in a Human-Robot collaborative object transportation task at a middle distance. We check that this force prediction can improve multiple parameters ... -
Inference vs. explicitness. Do we really need the perfect predictor? The human-robot collaborative object transportation case
(2023)
Text en actes de congrés
Accés restringit per política de l'editorialWhen robots interact with humans, limitations in their internal models arise due to the uncertainty and even randomness of human behavior. This has led to attempts to predict human future actions and infer their intent. ... -
Integrating task planning and interactive learning for robots to work in human environments
(AAAI Press. Association for the Advancement of Artificial Intelligence, 2011)
Text en actes de congrés
Accés obertHuman environments are challenging for robots, which need to be trainable by lay people and learn new behaviours rapidly without disrupting much the ongoing activity. A system that integrates AI techniques for planning and ... -
Learning new human gestures through Human Robot Interaction
(Universitat Politècnica de Catalunya, 2023-05-16)
Projecte Final de Màster Oficial
Accés restringit per decisió de l'autorHand gesture recognition has been extensively used for human-robot interaction in recent years, as they provide a simple and intuitive approach to communication with social and assistive robots. For many real-world ... -
OCRA – An ontology for collaborative robotics and adaptation
(2022)
Article
Accés obertIndustrial collaborative robots will be used in unstructured scenarios and a large variety of tasks in the near future. These robots shall collaborate with humans, who will add uncertainty and safety constraints to the ... -
On cognitive assistant robots for reducing variability in industrial human-robot activities
(Multidisciplinary Digital Publishing Institute, 2020-07-26)
Article
Accés obertIn the industrial domain, one important research activity for cognitive robotics is the development of assistant robots. In this work, we show how the use of a cognitive assistant robot can contribute to (i) improving task ... -
On interaction quality in human-robot interaction
(SciTePress, 2017)
Text en actes de congrés
Accés obertIn many complex robotics systems, interaction takes place in all directions between human, robot, and environment. Performance of such a system depends on this interaction, and a proper evaluation of a system must build ... -
On the pertinence of social practices for social robotics
(IOS Press, 2018)
Text en actes de congrés
Accés obertIn the area of consumer robots that need to have rich social interactions with humans, one of the challenges is the complexity of computing the appropriate interactions in a cognitive, social and physical context. We propose ... -
Pain and anxiety treatment based on social robot interaction with children to improve patient experience. Ongoing research
(2012)
Comunicació de congrés
Accés obertA major focus for children’s quality of life programs in hospitals is improving their experiences during procedures. In anticipation of treatment, children may become anxious and during procedures pain appears. The aim ... -
Perception-intention-action cycle as a human acceptable way for improving human-robot collaborative tasks
(Association for Computing Machinery (ACM), 2023)
Text en actes de congrés
Accés obertIn Human-Robot Collaboration (HRC) tasks, the classical Perception-Action cycle can not fully explain the collaborative behaviour of the human-robot pair until it is extended to Perception-Intention-Action (PIA) cycle, ... -
Perception–intention–action cycle in human–robot collaborative tasks: the collaborative lightweight object transportation use-case
(Springer, 2024-03-25)
Article
Accés obertThis study proposes to improve the reliability, robustness and human-like nature of Human–Robot Collaboration (HRC). For that, the classical Perception–Action cycle is extended to a Perception–Intention–Action (PIA) cycle, ... -
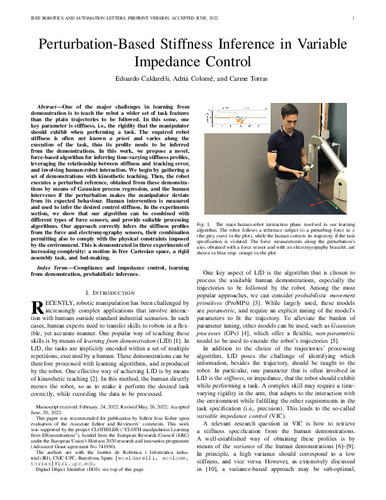
Perturbation-based stiffness Inference in variable impedance control
(Institute of Electrical and Electronics Engineers (IEEE), 2022-07-01)
Article
Accés obertOne of the major challenges in learning from demonstration is to teach the robot a wider set of task features than the plain trajectories to be followed. In this sense, one key parameter is stiffness, i.e., the rigidity ... -
Planning interactions as an event handling solution for successful and balanced human-robot collaboration
(2022)
Text en actes de congrés
Accés restringit per política de l'editorialDealing with the stochastic nature of human behaviour in Human-Robot Collaboration (HRC) remains a well known challenge that needs to be tackled. Automated task planning techniques have been implemented in order to share ... -
Plataforma para un entorno asistencial inteligente heterogéneo
(Comité Español de Automática (CEA-IFAC), 2018)
Text en actes de congrés
Accés obertLa creciente demanda de soporte tecnológico para la asistencia a personas con necesidades especiales obliga a avanzar tecnológi-camente hacia sistemas más eficientes y con más prestaciones. En esta íinea, en este artículo ... -
Posada en marxa de comunicacions OPC UA per a robot col·laboratiu
(Universitat Politècnica de Catalunya, 2023-02-01)
Treball Final de Grau
Accés obertEn l’actualitat es disposa de diferents mètodes per comunicar el creixent nombre de dispositius a la indústria i als centres de producció. Alguns d’aquests mètodes es van desenvolupar fa gairebé mig segle i comencen a tenir ... -
Posada en marxa d’un robot col·laboratiu
(Universitat Politècnica de Catalunya, 2020-07-13)
Treball Final de Grau
Accés obertAquest document és el resultat del treball de final d’estudis del grau d’Enginyeria Electrònica Industrial i Automàtica. Té la finalitat de realitzar la posada en marxa d’una estació amb robot col·laboratiu de la marca ...