Exploració per autor "Borràs Sol, Júlia"
Ara es mostren els items 21-37 de 37
-
Kinematics of line-plane subassemblies in Stewart platforms

(IEEE, 2009-05-31)
(IEEE, 2009-05-31)
Text en actes de congrés
Accés obertWhen the attachments of five legs in a Stewart platform are collinear on one side and coplanar on the other, the platform is said to contain a line-plane subassembly. This paper is devoted to the kinematics analysis of ... -
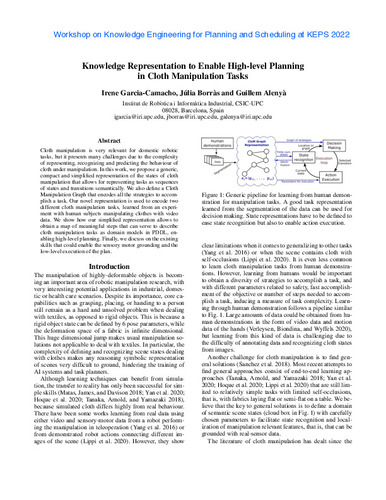
Knowledge representation to enable high-level planning in cloth manipulation tasks
(2022)
Text en actes de congrés
Accés obertCloth manipulation is very relevant for domestic robotic tasks, but it presents many challenges due to the complexity of representing, recognizing and predicting the behaviour of cloth under manipulation. In this work, we ... -
New geometric approaches to the analysis and design of Stewart-Gough platforms
(Institute of Electrical and Electronics Engineers (IEEE), 2014)
Article
Accés obertIn general, rearranging the legs of a Stewart-Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
New geometric approaches to the singularity analysis of parallel platforms
(Escuela Superior de Ingenieros de la Universidad de Sevilla, 2011)
Text en actes de congrés
Accés obertIn general, rearranging the legs of a Stewart- Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
On quartically-solvable robots
(Institute of Electrical and Electronics Engineers (IEEE), 2015)
Text en actes de congrés
Accés obertThis paper presents a first attempt at a unified kinematics analysis of all serial and parallel solvable robots, that is, robots whose position analysis can be carried out without relying on numerical methods. The efforts ... -
On the primal and dual forms of the Stewart platform pure condition
(2012)
Article
Accés obertThe algebraic characterization of the singularities of a Stewart platform is usually presented as a 6 × 6 determinant, whose rows correspond to the line coordinates of its legs, equated to zero. This expression can be ... -
On ¿-transforms
(2009)
Article
Accés obertAnyset of two legs in a Gough–Stewart platform sharing an attachment is defined as a Δcomponent. This component links a point in the platform (base) to a line in the base (platform). Thus, if the two legs, which are involved ... -
Optimal design of a 6-DOF 4-4 parallel manipulator with uncoupled singularities
(Asociación Española de Ingeniería Mecánica, 2008)
Text en actes de congrés
Accés obertA 6-DOF 4-4 parallel manipulator is presented. Its forward kinematics can be solved by a sequence of three trilaterations and, as a consequence, its singularities can be described in geometric terms as the degeneration of ... -
Polynomial solution to the position analysis of two Assur kinematic chains with four loops and the same topology

(ASME PRESS, 2009)
(ASME PRESS, 2009)
Article
Accés restringit per política de l'editorialThe direct position analysis (DPA) of a manipulator is the computation of the end-effector poses (positions and orientations) compatible with assigned values of the actuated-joint variables. Assigning the actuated-joint ... -
Singularity-invariant families of line-plane 5-SPU platforms
(2011-10)
Article
Accés obertA 5-SPU robot with collinear universal joints is well suited to handling an axisymmetric tool, since it has 5 controllable DoFs and the remaining one is a free rotation around the tool. The kinematics of such a robot ... -
Singularity-invariant leg rearrangements in doubly-planar Stewart-Gough platforms
(2010)
Text en actes de congrés
Accés obertIn general, rearranging the legs of a Stewart-Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
Singularity-invariant leg rearrangements in Stewart-Gough platforms
(Springer Verlag, 2010)
Text en actes de congrés
Accés obert -
Singularity-invariant leg substitutions in pentapods
(2010)
Text en actes de congrés
Accés obertA pentapod is usually defined as a 5-degree-offreedom fully-parallel manipulator with an axial spindle as moving platform. This kind of manipulators have revealed as an interesting alternative to serial robots handling ... -
Straightening-free algorithm for the singularity analysis of Stewart-Gough platforms with collinear/coplanar attachments
(Springer Verlag, 2009)
Text en actes de congrés
Accés obertAn algorithm to derive the pure condition of any double-planar Stewart-Gough platform in a standard form suitable for comparison is presented. By applying the multilinear properties of brackets directly to the superbracket ... -
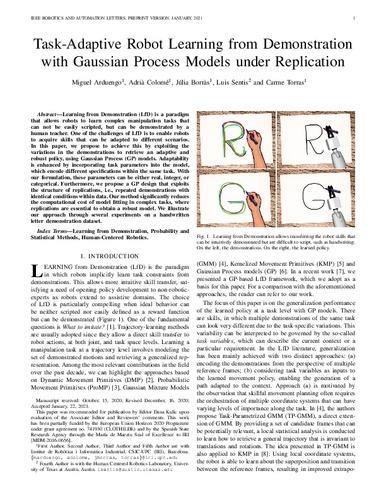
Task-adaptive robot learning from demonstration with gaussian process models under replication
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Article
Accés obertLearning from Demonstration (LfD) is a paradigm that allows robots to learn complex manipulation tasks that can not be easily scripted, but can be demonstrated by a human teacher. One of the challenges of LfD is to enable ... -
The KIT swiss knife gripper for disassembly tasks: a multi-functional gripper for bimanual manipulation with a single arm
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertThis work presents the concept of a robotic gripper designed for the disassembly of electromechanical devices that comprises several innovative ideas. Novel concepts include the ability to interchange built-in tools without ... -
The octahedral manipulator revisited
(IEEE, 2012)
Text en actes de congrés
Accés obertIn most practical implementations of the Gough- Stewart platform, the octahedral form is either taken as it stands or is approximated. The kinematics of this particula r instance of the Gough-Stewart platform, commonly ...