Exploració per autor "Corona Puyane, Enric"
Ara es mostren els items 1-14 de 14
-
Active garment recognition and target grasping point detection using deep learning

(2018-02-01)
(2018-02-01)
Article
Accés obertIdentification and bi-manual handling of deformable objects, like textiles, is one of the most challenging tasks in the field of industrial and service robotics. Their unpredictable shape and pose makes it very difficult ... -
Context-aware human modelling
(2020-07-28)
Report de recerca
Accés obert -
Context-aware human motion prediction
(2020)
Comunicació de congrés
Accés obertThe problem of predicting human motion given a sequence of past observations is at the core of many applications in robotics and computer vision. Current state-of-the-art formulates this problem as a sequence-to-sequence ... -
D-NeRF: neural radiance fields for dynamic scenes
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Text en actes de congrés
Accés obertNeural rendering techniques combining machine learning with geometric reasoning have arisen as one of the most promising approaches for synthesizing novel views of a scene from a sparse set of images. Among these, stands ... -
Enhancing egocentric 3D pose estimation with third person views
(Elsevier, 2023-06)
Article
Accés obertWe propose a novel approach to enhance the 3D body pose estimation of a person computed from videos captured from a single wearable camera. The main technical contribution consists of leveraging high-level features linking ... -
Ganhand: predicting human grasp affordances in multi-object scenes
(2020)
Comunicació de congrés
Accés obertThe rise of deep learning has brought remarkable progress in estimating hand geometry from images where the hands are part of the scene. This paper focuses on a new problem not explored so far, consisting in predicting how ... -
Learned vertex descent: a new direction for 3D human model fitting
(Springer, 2022)
Text en actes de congrés
Accés obertWe propose a novel optimization-based paradigm for 3D human model fitting on images and scans. In contrast to existing approaches that directly regress the parameters of a low-dimensional statistical body model (e.g. SMPL) ... -
Modeling and reconstruction of 3D humans

(2023-11-16)
(2023-11-16)
Tesi
Accés restringit per acord de confidencialitat(English) Understanding humans in images has been a long-standing goal in Computer Vision. Recently, modelling and generation of virtual humans has become a popular area of research spurred by the success of deep learning, ... -
Multi-FinGAN: generative coarse-to-fine sampling of multi-finger grasps
(2021)
Text en actes de congrés
Accés obertWhile there exists many methods for manipulating rigid objects with parallel-jaw grippers, grasping with multi- finger robotic hands remains a quite unexplored research topic. Reasoning and planning collision-free trajectories ... -
PI-Net: Pose Interacting Network for Multi-Person Monocular 3D Pose Estimation
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Text en actes de congrés
Accés obertRecent literature addressed the monocular 3D pose estimation task very satisfactorily. In these studies, different persons are usually treated as independent pose instances to estimate. However, in many every-day situations, ... -
Robot-aided cloth classification using depth information and CNNs
(2016)
Text en actes de congrés
Accés obertWe present a system to deal with the problem of classifying garments from a pile of clothes. This system uses a robot arm to extract a garment and show it to a depth camera. Using only depth images of a partial view of the ... -
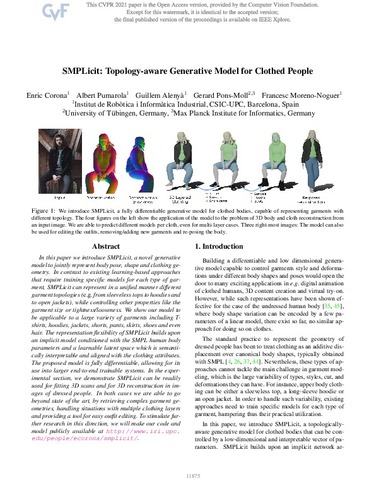
SMPLicit: Topology-aware generative model for clothed people
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Text en actes de congrés
Accés obertIn this paper we introduce SMPLicit, a novel generative model to jointly represent body pose, shape and clothing geometry. In contrast to existing learning-based approaches that require training specific models for each ... -
Structured 3D features for reconstructing controllable avatars
(2023)
Comunicació de congrés
Accés obertWe introduce Structured 3D Features, a model based on a novel implicit 3D representation that pools pixel-aligned image features onto dense 3D points sampled from a parametric, statistical human mesh surface. The 3D points ... -
Using CNNs to classify and grasp cloth garments
(Universitat Politècnica de Catalunya, 2016-06)
Treball Final de Grau
Accés obertLa manipulació i identificació d’objectes deformables actualment es considera un dels problemes més ambiciosos en l’àmbit de la robòtica. A causa de la seva forma i posició imprevisibles, és molt difícil reconèixer-los ...