Mostra el registre d'ítem simple
Graph-based segmentation of range data with applications to 3D urban mapping
| dc.contributor.author | Ortega Jiménez, Agustín Alberto |
| dc.contributor.author | Haddad Casadevall, Ismael |
| dc.contributor.author | Andrade-Cetto, Juan |
| dc.contributor.other | Institut de Robòtica i Informàtica Industrial |
| dc.date.accessioned | 2010-09-10T10:34:55Z |
| dc.date.available | 2010-09-10T10:34:55Z |
| dc.date.created | 2010 |
| dc.date.issued | 2010 |
| dc.identifier.citation | Ortega, A.A.; Haddad, I.; Andrade-Cetto, J. Graph-based segmentation of range data with applications to 3D urban mapping. A: European Conference on Mobile Robots. "4th European Conference on Mobile Robots". Mlini, Dubrovnik: 2010, p. 193-198. |
| dc.identifier.isbn | 978-953-6037-54-4 |
| dc.identifier.uri | http://hdl.handle.net/2117/8814 |
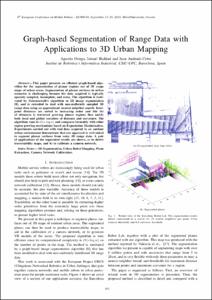
| dc.description.abstract | This paper presents an efficient graph-based algorithm for the segmentation of planar regions out of 3D range maps of urban areas. Segmentation of planar surfaces in urban scenarios is challenging because the data acquired is typically sparsely sampled, incomplete, and noisy. The algorithm is motivated by Felzenszwalb’s algorithm to 2D image segmentation [8], and is extended to deal with non-uniformly sampled 3D range data using an approximate nearest neighbor search. Interpoint distances are sorted in increasing order and this list of distances is traversed growing planar regions that satisfy both local and global variation of distance and curvature. The algorithm runs in O(n log n) and compares favorably with other region growing mechanisms based on Expectation Maximization. Experiments carried out with real data acquired in an outdoor urban environment demonstrate that our approach is well-suited to segment planar surfaces from noisy 3D range data. A pair of applications of the segmented results are shown, a) to derive traversability maps, and b) to calibrate a camera network. |
| dc.format.extent | 6 p. |
| dc.language.iso | eng |
| dc.subject | Àrees temàtiques de la UPC::Informàtica::Robòtica |
| dc.subject.lcsh | Mobile robots |
| dc.title | Graph-based segmentation of range data with applications to 3D urban mapping |
| dc.type | Conference report |
| dc.subject.lemac | Robots mòbils |
| dc.contributor.group | Universitat Politècnica de Catalunya. VIS - Visió Artificial i Sistemes Intel·ligents |
| dc.description.peerreviewed | Peer Reviewed |
| dc.subject.inspec | Classificació INSPEC::Automation::Robots::Mobile robots |
| dc.relation.publisherversion | http://www.ecmr09.fer.hr/ |
| dc.rights.access | Open Access |
| local.identifier.drac | 2435163 |
| dc.description.version | Postprint (published version) |
| local.citation.author | Ortega, A.A.; Haddad, I.; Andrade-Cetto, J. |
| local.citation.contributor | European Conference on Mobile Robots |
| local.citation.pubplace | Mlini, Dubrovnik |
| local.citation.publicationName | 4th European Conference on Mobile Robots |
| local.citation.startingPage | 193 |
| local.citation.endingPage | 198 |