Exploració per tema "Mobile robots--Automatic control"
Ara es mostren els items 1-19 de 19
-
3D environment mapping using the Kinect V2 and path planning based on RRT algorithms

(2016-10-18)
(2016-10-18)
Article
Accés obertThis paper describes a 3D path planning system that is able to provide a solution trajectory for the automatic control of a robot. The proposed system uses a point cloud obtained from the robot workspace, with a Kinect V2 ... -
3D mapping for urban service robots
(IEEE Press. Institute of Electrical and Electronics Engineers, 2009-10-11)
Text en actes de congrés
Accés obertWe present an approach to the problem of 3D map building in urban settings for service robots, using threedimensional laser range scans as the main data input. Our system is based on the probabilistic alignment of 3D point ... -
Aplicació web per a plataforma mòbil amb braç robòtic articulat

(Universitat Politècnica de Catalunya, 2021-02)
(Universitat Politècnica de Catalunya, 2021-02)
Treball Final de Grau
Accés restringit per decisió de l'autorEl projecte que aquí es presenta es vol focalitzar en el muntatge d’un robot mòbil i el disseny de la interfície que permet un control remot. Es tracta doncs d’un treball amb un rerefons majoritàriament pràctic, i pretén ... -
Audio localization for mobile robots
(2009-09-30)
Report de recerca
Accés obertThe department of the University for which I worked is developing a project based on the interaction with robots in the environment. My work was to define an audio system for the robot. This audio system that I have to ... -
Biologically inspired path execution using SURF flow in robot navigation
(2011-06)
Article
Accés restringit per política de l'editorialAn exportable and robust system using only camera images is proposed for path execution in robot navigation. Motion information is extracted in the form of optical flow from SURF robust descriptors of consecutive frames, ... -
Brazo robótico controlado remotamente
(Universitat Politècnica de Catalunya, 2016-07)
Treball Final de Grau
Accés obertEn el presente proyecto se explica cómo se ha construido el prototipo de un brazo robótico. El objetivo del presente proyecto es el de crear un prototipo fácil de programar y de utilizar por parte del usuario. Una de las ... -
Control de una plataforma móvil mediante microcontrolador
(Universitat Politècnica de Catalunya, 2015-10)
Treball Final de Grau
Accés obert -
Control de velocitat d'un robot mòbil
(Universitat Politècnica de Catalunya, 2017-07)
Treball Final de Grau
Accés obertEn aquest projecte s’ha dut a terme la implementació d’un control de velocitat i posició en una plataforma robòtica mòbil. Al llarg del projecte es repassa la història de la robòtica autònoma, la seva evolució i el moment ... -
Control remot d'un robot mòbil des d'un dispositiu Android
(Universitat Politècnica de Catalunya, 2014-10)
Treball Final de Grau
Accés restringit per decisió de l'autor -
Desenvolupament d'algorismes de planificació de camins amb Robotino i ROS
(Universitat Politècnica de Catalunya, 2018-06)
Treball Final de Grau
Accés obert -
Estudi del modelat i control d'un robot mòbil omnidireccional.
(Universitat Politècnica de Catalunya, 2017-01)
Treball Final de Grau
Accés restringit per decisió de l'autorEl projecte consisteix en la modelització i control d'un robot mòbil omnidireccional de 4 rodes. Es pretén desenvolupar un model dinàmic/cinemàtic del robot que s’implementarà mitjançant Matlab/Simulink. La calibració dels ... -
Fault detection and isolation for autonomous mobile robot systems
(Universitat Politècnica de Catalunya, 2014-06-30)
Treball Final de Grau
Accés restringit per decisió de l'autorThis Project is about the fault detection and isolation with a tolerant control for autonomous mobile robot systems. The omnidirectional robot model is developed to obtain a benchmark that can be implemented as a simulator. ... -
Mobile manipulators as robot co-workers: autonomy and interaction in the human-robot collaboration
(Comité Español de Automática (CEA-IFAC), 2017)
Comunicació de congrés
Accés restringit per política de l'editorialIn work environments, the use of dexterous mobile manipulators as co-workers poses several challenges with respect to the human-robot collaboration. On the one hand, its focus is in the autonomy (i.e. the mobile manipulators ... -
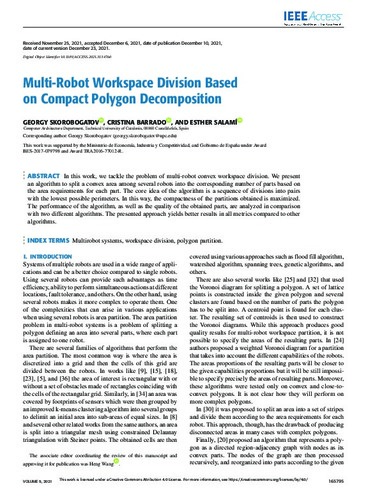
Multi-Robot workspace division based on compact polygon decomposition
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Article
Accés obertIn this work, we tackle the problem of multi-robot convex workspace division. We present an algorithm to split a convex area among several robots into the corresponding number of parts based on the area requirements for ... -
Robots per a aplicacions forestals
(Universitat Politècnica de Catalunya, 2019-10-21)
Treball Final de Grau
Accés obertEl principal objectiu d’aquest projecte és dissenyar un sistema format per tres robots que permetin reforestar terrenys de forma autònoma, on cadascun tindrà una funció concreta però no deixa de ser una acció conjunta, si ... -
Sistema de control d'un robot via web
(Universitat Politècnica de Catalunya, 2017-07)
Treball Final de Grau
Accés obertAquest projecte consisteix en un sistema que permet controlar un robot, en el nostre cas LEGO Mindstorm, via navegador web. La idea principal forma part del concepte Internet of Things (IoT) ja que donem la capacitat al ... -
Sistema vigilància dels incendis forestals mitjançant un robot motoritzat
(Universitat Politècnica de Catalunya, 2015-10)
Treball Final de Grau
Accés obertAquest projecte tracta del disseny i construcció d’un robot que sigui capaç de realitzar la tasca de vigilància dels boscos per prevenir els incendis forestals. Es tracta d’un vehicle motoritzat elèctricament el qual disposa ... -
Task planning using physics-based heuristics on manipulation actions
(Institute of Electrical and Electronics Engineers (IEEE), 2016)
Text en actes de congrés
Accés obertIn order to solve mobile manipulation problems, the efficient combination of task and motion planning is usually required. Moreover, the incorporation of physics-based information has recently been taken into account in ... -
Task space consensus in networks of heterogeneous and uncertain robotic systems with variable time-delays
(2017-06-01)
Article
Accés obertThis work deals with the leader-follower and the leaderless consensus problems in networks of multiple robot manipulators. The robots are non-identical, kinematically different (heterogeneous), and their physical parameters ...