Exploració per autor "Borràs Sol, Júlia"
Ara es mostren els items 30-37 de 37
-
Singularity-invariant families of line-plane 5-SPU platforms

(2011-10)
(2011-10)
Article
Accés obertA 5-SPU robot with collinear universal joints is well suited to handling an axisymmetric tool, since it has 5 controllable DoFs and the remaining one is a free rotation around the tool. The kinematics of such a robot ... -
Singularity-invariant leg rearrangements in doubly-planar Stewart-Gough platforms
(2010)
Text en actes de congrés
Accés obertIn general, rearranging the legs of a Stewart-Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
Singularity-invariant leg rearrangements in Stewart-Gough platforms
(Springer Verlag, 2010)
Text en actes de congrés
Accés obert -
Singularity-invariant leg substitutions in pentapods
(2010)
Text en actes de congrés
Accés obertA pentapod is usually defined as a 5-degree-offreedom fully-parallel manipulator with an axial spindle as moving platform. This kind of manipulators have revealed as an interesting alternative to serial robots handling ... -
Straightening-free algorithm for the singularity analysis of Stewart-Gough platforms with collinear/coplanar attachments
(Springer Verlag, 2009)
Text en actes de congrés
Accés obertAn algorithm to derive the pure condition of any double-planar Stewart-Gough platform in a standard form suitable for comparison is presented. By applying the multilinear properties of brackets directly to the superbracket ... -
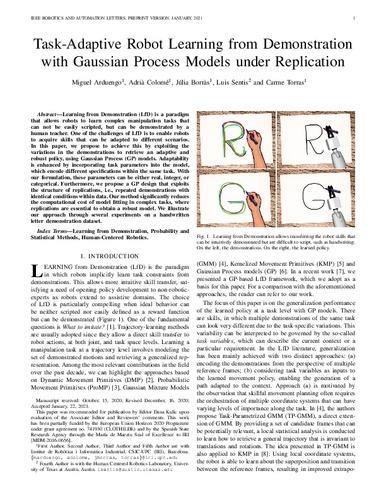
Task-adaptive robot learning from demonstration with gaussian process models under replication
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Article
Accés obertLearning from Demonstration (LfD) is a paradigm that allows robots to learn complex manipulation tasks that can not be easily scripted, but can be demonstrated by a human teacher. One of the challenges of LfD is to enable ... -
The KIT swiss knife gripper for disassembly tasks: a multi-functional gripper for bimanual manipulation with a single arm
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertThis work presents the concept of a robotic gripper designed for the disassembly of electromechanical devices that comprises several innovative ideas. Novel concepts include the ability to interchange built-in tools without ... -
The octahedral manipulator revisited
(IEEE, 2012)
Text en actes de congrés
Accés obertIn most practical implementations of the Gough- Stewart platform, the octahedral form is either taken as it stands or is approximated. The kinematics of this particula r instance of the Gough-Stewart platform, commonly ...