Exploració per autor "Alenyà Ribas, Guillem"

Ara es mostren els items 77-96 de 153
-
Joining high-level symbolic planning with low-level motion primitives in adaptive HRI: application to dressing assistance

(Institute of Electrical and Electronics Engineers (IEEE), 2018)
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertFor a safe and successful daily living assistance, far from the highly controlled environment of a factory, robots should be able to adapt to ever-changing situations. Programming such a robot is a tedious process that ... -
Knowledge representation for explainability in collaborative robotics and adaptation
(CEUR-WS.org, 2021)
Text en actes de congrés
Accés obertAutonomous robots are going to be used in a large diversity of contexts, interacting and/or collaborating with humans, who will add uncertainty to the collaborations and cause re-planning and adaptations to the execution ... -
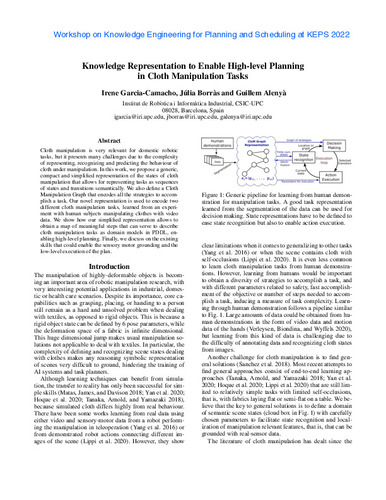
Knowledge representation to enable high-level planning in cloth manipulation tasks
(2022)
Text en actes de congrés
Accés obertCloth manipulation is very relevant for domestic robotic tasks, but it presents many challenges due to the complexity of representing, recognizing and predicting the behaviour of cloth under manipulation. In this work, we ... -
Learned vertex descent: a new direction for 3D human model fitting
(Springer, 2022)
Text en actes de congrés
Accés obertWe propose a novel optimization-based paradigm for 3D human model fitting on images and scans. In contrast to existing approaches that directly regress the parameters of a low-dimensional statistical body model (e.g. SMPL) ... -
Learning cloth manipulation with demonstrations
(2019)
Report de recerca
Accés obertRecent advances in Deep Reinforcement learning and computational capabilities of GPUs have led to variety of research being conducted in the learning side of robotics. The main aim being that of making autonomous robots ... -
Learning probabilistic action models from interpretation transitions
(2015)
Text en actes de congrés
Accés obertProbabilistic planners are very flexible tools that provide good solutions for difficult tasks. However, they rely on a model of the domain and actions, which they have difficulties to learn for complex tasks. We propose ... -
Learning relational dynamics of stochastic domains for planning
(2016)
Text en actes de congrés
Accés obertProbabilistic planners are very flexible tools that can provide good solutions for difficult tasks. However, they rely on a model of the domain, which may be costly to either hand code or automatically learn for complex ... -
Learning RGB-D descriptors of garment parts for informed robot grasping
(2014)
Article
Accés obertRobotic handling of textile objects in household environments is an emerging application that has recently received considerable attention thanks to the development of domestic robots. Most current approaches follow a ... -
Learning robot policies using a high-level abstraction persona-behaviour simulator
(2019)
Text en actes de congrés
Accés obertCollecting data in Human-Robot Interaction for training learning agents might be a hard task to accomplish. This is especially true when the target users are older adults with dementia since this usually requires hours of ... -
Leveraging multiple environments for learning and decision making: a dismantling use case

(Institute of Electrical and Electronics Engineers (IEEE), 2020)
(Institute of Electrical and Electronics Engineers (IEEE), 2020)
Text en actes de congrés
Accés restringit per política de l'editorialLearning is usually performed by observing real robot executions. Physics-based simulators are a good alternative for providing highly valuable information while avoiding costly and potentially destructive robot executions. ... -
Lock-in time-of-flight (ToF) cameras: a survey
(2011)
Article
Accés obertThis paper reviews the state-of-the art in the field of lock-in ToF cameras, their advantages, their limitations, the existing calibration methods, and the way they are being used, sometimes in combination with other ... -
Machine learning methods for quality prediction in thermoplastics injection molding
(Institute of Electrical and Electronics Engineers (IEEE), 2021)
Text en actes de congrés
Accés obertNowadays, competitiveness is a reality in all industrial fields and the plastic injection industry is not an exception. Due to the complex intrinsic changes that the parameters undergo during the injection process, it is ... -
Monocular object pose computation with the foveal-peripheral camera of the humanoid robot Armar-III
(IOS Press, 2008)
Capítol de llibre
Accés obertActive contour modelling is useful to fit non-textured objects, and algorithms have been developed to recover the motion of an object and its uncertainty. Here we show that these algorithms can be used also with point ... -
Natural teaching of robot-assisted rearranging exercises for cognitive training
(2019)
Text en actes de congrés
Accés obertSocial Assistive Robots are a powerful tool to be used in patients’ cognitive training. The purpose of this study is to evaluate a new methodology to enable caregivers to teach cognitive exercises to the robot in an easy ... -
Object detection methods for robot grasping: Experimental assessment and tuning
(IOS Press, 2012)
Text en actes de congrés
Accés obertIn this work we address the problem of object detection for the purpose of object manipulation in a service robotics scenario. Several implementations of state-of-the-art object detection methods were tested, and the one ... -
Object modeling using a ToF camera under an uncertainty reduction approach
(2010)
Text en actes de congrés
Accés obertTime-of-Flight (ToF) cameras deliver 3D images at 25 fps, offering great potential for developing fast object modeling algorithms. Surprisingly, this potential has not been extensively exploited up to now. A reason for ... -
OCRA – An ontology for collaborative robotics and adaptation
(2022)
Article
Accés obertIndustrial collaborative robots will be used in unstructured scenarios and a large variety of tasks in the near future. These robots shall collaborate with humans, who will add uncertainty and safety constraints to the ... -
On inferring intentions in shared tasks for industrial collaborative robots
(2019)
Article
Accés obertInferring human operators' actions in shared collaborative tasks, plays a crucial role in enhancing the cognitive capabilities of industrial robots. In all these incipient collaborative robotic applications, humans and ... -
Online action recognition
(AAAI Press, 2021)
Text en actes de congrés
Accés obertRecognition in planning seeks to find agent intentions, goals or activities given a set of observations and a knowledge library (e.g. goal states, plans or domain theories). In this work we introduce the problem of Online ... -
Personalization framework for adaptive robotic feeding assistance
(2016)
Text en actes de congrés
Accés obertThe deployment of robots at home must involve robots with pre-defined skills and the capability of personalizing their behavior by non-expert users. A framework to tackle this personalization is presented and applied to ...