Exploració per autor "Alenyà Ribas, Guillem"

Ara es mostren els items 61-80 de 153
-
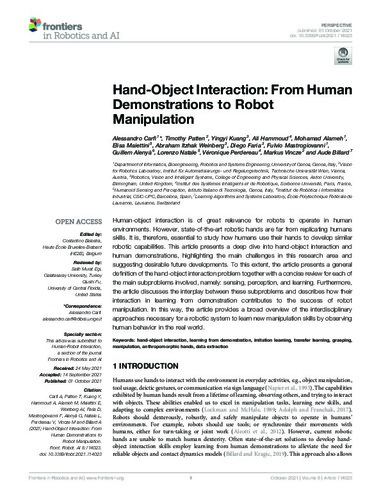
Hand-object interaction: from human demonstrations to robot manipulation

(Frontiers Media SA, 2021-10-01)
(Frontiers Media SA, 2021-10-01)
Article
Accés obertHuman-object interaction is of great relevance for robots to operate in human environments. However, state-of-the-art robotic hands are far from replicating humans skills. It is, therefore, essential to study how humans ... -
Handling high parameter dimensionality in reinforcement learning with dynamic motor primitives
(2013)
Text en actes de congrés
Accés obertDynamic Motor Primitives (DMP) are nowadays widely used as movement parametrization for learning trajectories, because of their linearity in the parameters, rescalation robustness and continuity. However, when learning a ... -
Household cloth object set: fostering benchmarking in deformable object manipulation
(Institute of Electrical and Electronics Engineers (IEEE), 2022-07)
Article
Accés obertBenchmarking of robotic manipulations is one of the open issues in robotic research. An important factor that has enabled progress in this area in the last decade is the existence of common object sets that have been shared ... -
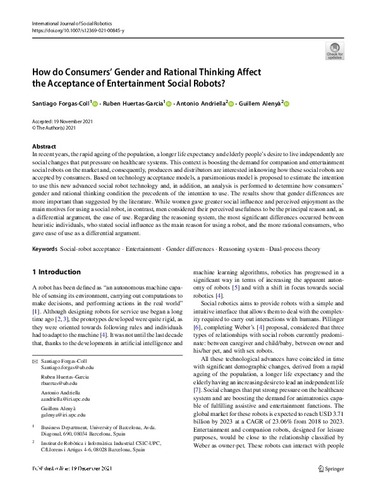
How do consumers’ gender and rational thinking affect the acceptance of entertainment social robots?
(2022)
Article
Accés obertIn recent years, the rapid ageing of the population, a longer life expectancy and elderly people’s desire to live independently are social changes that put pressure on healthcare systems. This context is boosting the demand ... -
Humanoid robotics and human-centered initiatives at IRI
(Secretariado de Publicaciones e Intercambio científico. Universidad de Valladolid, 2009-09)
Comunicació de congrés
Accés obertThe interest of the robotics community on humanoid robots is growing, specially in perception, scene understanding and manipulation in humancentered environments, as well as in human-robot interaction. Moreover, humanoid ... -
“I know how you feel”: the importance of interaction style on users’ acceptance in an entertainment scenario
(2022)
Article
Accés obertIn this article, we aim to evaluate the role of robots’ personality-driven behavioural patterns on users’ intention to use in an entertainment scenario. Toward such a goal, we designed two personalities: one introverted ... -
iCub platform: IIT workshop in Genova
(2010)
Report de recerca
Accés obertThis document outlines the most important concepts presented during a workshop about the iCub robot done at the Instituto Italiano di Technologia in Genova. Mechanical, electronic as well as rmware and software issues are ... -
Implications of robot backchannelling in cognitive therapy
(Springer, 2022)
Text en actes de congrés
Accés obertThe social ability of humans to provide active feedback during conversations is known as backchannelling. Recent work has recognised the importance of endowing robots with such social behaviour to make interactions more ... -
Improved task planning through failure anticipation in human-robot collaboration
(2022)
Text en actes de congrés
Accés obertThe human state is defined in terms of capacity, knowledge and motivation. The system has been implemented in a standardised environment using the Planning Domain Definition Language (PDDL) and the modular ROSPlan framework, ... -
Incremental learning of skills in a task-parameterized Gaussian Mixture Model
(2016)
Article
Accés obertProgramming by demonstration techniques facilitate the programming of robots. Some of them allow the generalization of tasks through parameters, although they require new training when trajectories different from the ones ... -
Indoor and outdoor depth imaging of leaves with time-of-flight and stereo vision sensors: analysis and comparison
(2014-02-01)
Article
Accés obertIn this article we analyze the response of Time-of-Flight (ToF) cameras (active sensors) for close range imaging under three different illumination conditions and compare the results with stereo vision (passive) sensors. ... -
Information-gain view planning for free-form object reconstruction with a 3D ToF camera
(Springer, 2012)
Text en actes de congrés
Accés obertActive view planning for gathering data from an unexplored 3D complex scenario is a hard and still open problem in the computer vision community. In this paper, we present a general task-oriented approach based on an ... -
Interaction identification through tactile sensing during cloth manipulation using a 3-axis touch sensor
(2020)
Text en actes de congrés
Accés obertTactile feedback during cloth manipulation could be crucial in addressing the huge challenges involved in closing the loop during execution, complementing vision. However, up to our knowledge, tactile sensing has only been ... -
Interleaving hierarchical task planning and motion constraint testing for dual-arm manipulation
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertIn recent years the topic of combining motion and symbolic planning to perform complex tasks in the field of robotics has received a lot of attention. The underlying idea is to have access at once to the reasoning capabilities ... -
Introducing CARESSER: A framework for in situ learning robot social assistance from expert knowledge and demonstrations
(2022)
Article
Accés obertSocially assistive robots have the potential to augment and enhance therapist’s effectiveness in repetitive tasks such as cognitive therapies. However, their contribution has generally been limited as domain experts have ... -
Introducing social robots to assess frailty in older adults
(2024)
Comunicació de congrés
Accés obertFrailty is a crucial indicator in determining the well-being of older adults in terms of their health. With the growing number of elderly people, the demand for geriatricians is increasing, which means that they have less ... -
Joining high-level symbolic planning with low-level motion primitives in adaptive HRI: application to dressing assistance
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertFor a safe and successful daily living assistance, far from the highly controlled environment of a factory, robots should be able to adapt to ever-changing situations. Programming such a robot is a tedious process that ... -
Knowledge representation for explainability in collaborative robotics and adaptation
(CEUR-WS.org, 2021)
Text en actes de congrés
Accés obertAutonomous robots are going to be used in a large diversity of contexts, interacting and/or collaborating with humans, who will add uncertainty to the collaborations and cause re-planning and adaptations to the execution ... -
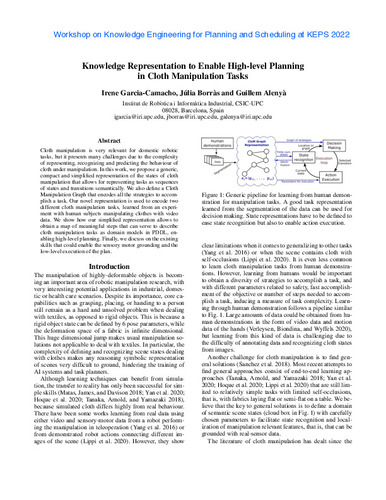
Knowledge representation to enable high-level planning in cloth manipulation tasks
(2022)
Text en actes de congrés
Accés obertCloth manipulation is very relevant for domestic robotic tasks, but it presents many challenges due to the complexity of representing, recognizing and predicting the behaviour of cloth under manipulation. In this work, we ... -
Learned vertex descent: a new direction for 3D human model fitting
(Springer, 2022)
Text en actes de congrés
Accés obertWe propose a novel optimization-based paradigm for 3D human model fitting on images and scans. In contrast to existing approaches that directly regress the parameters of a low-dimensional statistical body model (e.g. SMPL) ...