Exploració per autor "Thomas, Federico"

Ara es mostren els items 55-74 de 87
-
New algebraic conditions for the identification of the relative position of two coplanar ellipses

(2017-05-01)
(2017-05-01)
Article
Accés obertThe identification of the relative position of two real coplanar ellipses can be reduced to the identification of the nature of the singular conics in the pencil they define and, in general, their location with respect to ... -
New bracket polynomials associated with the general gough-stewart parallel robot singularities
(2023)
Text en actes de congrés
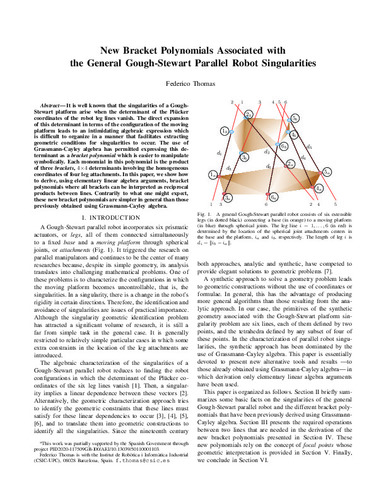
Accés obertIt is well known that the singularities of a Gough-Stewart platform arise when the determinant of the Plücker coordinates of the robot leg lines vanish. The direct expansion of this determinant in terms of the configuration ... -
New geometric approaches to the analysis and design of Stewart-Gough platforms
(Institute of Electrical and Electronics Engineers (IEEE), 2014)
Article
Accés obertIn general, rearranging the legs of a Stewart-Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
New geometric approaches to the singularity analysis of parallel platforms
(Escuela Superior de Ingenieros de la Universidad de Sevilla, 2011)
Text en actes de congrés
Accés obertIn general, rearranging the legs of a Stewart- Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
On Cayley's factorization of 4D rotations and applications

(2017-03-01)
(2017-03-01)
Article
Accés restringit per política de l'editorialA 4D rotation can be decomposed into a left- and a right-isoclinic rotation. This decomposition, known as Cayley’s factorization of 4D rotations, can be performed using the Elfrinkhof–Rosen method. In this paper, we present ... -
On Cayley's factorization with an application to the orthonormalization of noisy rotation matrices
(2019-05-09)
Article
Accés obertA real orthogonal matrix representing a rotation in four dimensions can be decomposed into the commutative product of a left- and a right-isoclinic rotation matrix. This operation, known as Cayley's factorization, directly ... -
On Cayley’s Factorization of 3D Rotations and Applications
(Facultat d'Informàtica de Barcelona (UPC), 2015)
Text en actes de congrés
Accés restringit per política de l'editorialA 4D rotation can be decomposed into a left- and a right-isoclinic rotation. This decomposition, known as Cayley’s factorization of 4D rotations, can be performed using the Elfrinkhof–Rosen method. In this paper, we present ... -
On closed-form solutions to the position analysis of Baranov trusses
(2012)
Article
Accés obertThe exact position analysis of a planar mechanism reduces to compute the roots of its characteristic polynomial. Obtaining this polynomial usually involves, as a first step, obtaining a system of equations derived from ... -
On generalized dual Euler angles
(Springer, 2014)
Text en actes de congrés
Accés obertThis paper first explores the generalization of Euler angles to the case in which the rotation axes are not necessarily members of an orthonormal triad, and presents a concise solution to their computation that relies on ... -
On quartically-solvable robots
(Institute of Electrical and Electronics Engineers (IEEE), 2015)
Text en actes de congrés
Accés obertThis paper presents a first attempt at a unified kinematics analysis of all serial and parallel solvable robots, that is, robots whose position analysis can be carried out without relying on numerical methods. The efforts ... -
On the primal and dual forms of the Stewart platform pure condition
(2012)
Article
Accés obertThe algebraic characterization of the singularities of a Stewart platform is usually presented as a 6 × 6 determinant, whose rows correspond to the line coordinates of its legs, equated to zero. This expression can be ... -
On ¿-transforms
(2009)
Article
Accés obertAnyset of two legs in a Gough–Stewart platform sharing an attachment is defined as a Δcomponent. This component links a point in the platform (base) to a line in the base (platform). Thus, if the two legs, which are involved ... -
Optimal design of a 6-DOF 4-4 parallel manipulator with uncoupled singularities
(Asociación Española de Ingeniería Mecánica, 2008)
Text en actes de congrés
Accés obertA 6-DOF 4-4 parallel manipulator is presented. Its forward kinematics can be solved by a sequence of three trilaterations and, as a consequence, its singularities can be described in geometric terms as the degeneration of ... -
Partially flagged parallel manipulators: singularity charting and avoidance
(2009-08)
Article
Accés obertThere are only three 6-SPS parallelmanipulatorswith triangular base and platform, i.e., the octahedral, the flagged, and the partially flagged, which are studied in this paper. The forward kinematics of the octahedralmanipulator ... -
Position analysis of a class of n-RRR planar parallel robots
(Springer, 2020)
Capítol de llibre
Accés obertParallel robots with a configurable platform are a class of parallel robots in which the end-effector is a closed-loop kinematic chain. In n-RRR planar robots the end-effector is a n-bar chain controlled by 'n' actuated ... -
Position and singularity analysis of a class of planar parallel manipulators with a reconfigurable end-effector
(2021)
Article
Accés obertParallel robots with configurable platforms are a class of robots in which the end-effector has an inner mobility, so that its overall shape can be reconfigured: in most cases, the end-effector is thus a closed-loop kinematic ... -
Sensor localization from distance and orientation constraints
(2016)
Article
Accés obertThe sensor localization problem can be formalized using distance and orientation constraints, typically in 3D. Local methods can be used to refine an initial location estimation, but in many cases such estimation is not ... -
Simplified Voronoi diagrams for motion planning of quadratically-solvable Gough-Stewart platforms
(Springer, 2012)
Text en actes de congrés
Accés obertThe obstacles in Configuration Space of quadratically-solvable Gough-Stewart platforms, due to both kinematic singularities and collisions, can be uniformly represented by a Boolean combination of signs of 4×4 determinants ... -
Singularity-free computation of quaternions from rotation matrices in E4 and E3
(2018)
Text en actes de congrés
Accés obertA real orthogonal matrix representing a rotation in E4 can be decomposed into the commutative product of a left-isoclinic and a right-isoclinic rotation matrix. The double quaternion representation of rotations in E4 follows ... -
Singularity-invariant families of line-plane 5-SPU platforms
(2011-10)
Article
Accés obertA 5-SPU robot with collinear universal joints is well suited to handling an axisymmetric tool, since it has 5 controllable DoFs and the remaining one is a free rotation around the tool. The kinematics of such a robot ...