Exploració per autor "Thomas, Federico"

Ara es mostren els items 39-58 de 87
-
Distance bound smoothing under orientation constraints

(Institute of Electrical and Electronics Engineers (IEEE), 2015)
(Institute of Electrical and Electronics Engineers (IEEE), 2015)
Text en actes de congrés
Accés obertDistance Bound Smoothing (DBS) is a basic operation originally developed in Computational Chemistry to determine point configurations that are within certain pairwise ranges of distances. This operation consist in the ... -
Distance geometry in active structures
(Springer, 2018)
Capítol de llibre
Accés obertDistance constraints are an emerging formulation that offers intuitive geometrical interpretation of otherwise complex problems. The formulation can be applied in problems such as position and singularity analysis and path ... -
Distance-based position analysis of the three seven-link Assur kinematic chains
(2011-02)
Article
Accés obertThe position analysis of planar linkages has been dominated by resultant elimination and tangent-half-angle substitution techniques applied to sets of kinematic loop equations. This analysis is thus reduced to finding ... -
Efficient computation of 3D skeletons by extreme vertex encoding
(2003)
Article
Accés obertMany skeletonisation algorithms for discrete volumes have been proposed. Despite its simplicity, the one given here still has many theoretically favorable properties. Actually, it provides a connected surface skeleton that ... -
Experiència pràctica de comunicació de Matemàtiques a la ciutadania i a secundària – 2a fase

(Universitat Politècnica de Catalunya. Institut de Ciències de l'Educació, 2013-02-08)
(Universitat Politècnica de Catalunya. Institut de Ciències de l'Educació, 2013-02-08)
Text en actes de congrés / Comunicació de congrés
Accés restringit per decisió de l'autorEl projecte implementa experiències pràctiques dels estudis universitaris de matemàtiques (grau, llicenciatura i màsters) en l'àmbit de la docència i la divulgació científica. La finalitat divulgativa pretén fomentar ... -
Flagged parallel manipulators
(IEEE, 2007)
Article
Accés obertThe conditions for a parallel manipulator to be flagged can be simply expressed in terms of linear dependencies between the coordinates of its leg attachments, both on the base and on the platform. These dependencies permit ... -
Forward kinematics of the general triple-arm robot using a distance-based formulation
(Springer, 2017)
Text en actes de congrés
Accés obertDistance-based formulations have successfully been used to obtain closure polynomialsfor planar mechanisms without relying, in most cases, on variable eliminations. The methods re-sulting from previous attempts to generalize ... -
Generation of under-actuated manipulators with non-holonomic joints from ordinary manipulators
(ASME PRESS, 2010)
Article
Accés obertThis paper shows how to generate under-actuated manipulators by substituting nonholonomic spherical pairs (nS pairs) for (holonomic) spherical pairs (S pairs) in ordinary (i.e. not under-actuated) manipulators. As a case ... -
Generation of under-actuated parallel robots with non-holonomic joints and kinetostatic analysis of a case-study
(2009)
Text en actes de congrés
Accés restringit per política de l'editorialIt will be shown how to generate under-actuated manipulators by substituting non-holonomic spherical pairs (nS pairs) for (holonomic) spherical pairs (S pairs) in fully-parallel manipulators (FPMs). Through this pair ... -
Geometric path planning without maneuvers for nonholonomic parallel orienting robots
(Institute of Electrical and Electronics Engineers (IEEE), 2016-07)
Article
Accés obertCurrent geometric path planners for nonholonomic parallel orienting robots generate maneuvers consisting of a sequence of moves connected by zero-velocity points. The need for these maneuvers restrains the use of this kind ... -
Grasping unknown objects in clutter by superquadric representation
(Institute of Electrical and Electronics Engineers (IEEE), 2018)
Text en actes de congrés
Accés obertIn this paper, a quick and efficient method is presented for grasping unknown objects in clutter. The grasping method relies on real-time superquadric (SQ) representation of partial view objects and incomplete object ... -
Hand-eye calibration made easy through a closed-form two-stage method
(Institute of Electrical and Electronics Engineers (IEEE), 2022)
Article
Accés obertAn analysis of the existing hand-eye calibration methods reveals that most of them are far from trivial. And, what is worse, their intrinsic complexity makes it difficult to elucidate under which circumstances they fail ... -
Kinematics of a gear-based spherical mechanism
(Springer, 2022)
Text en actes de congrés
Accés restringit per política de l'editorialKazuki Abe and his collaborators have recently presented an actuated gear-based spherical mechanism called ABENICS. It has received a lot of attention, not only because of its eye-catching motions during operation, but ... -
Kinematics of line-plane subassemblies in Stewart platforms
(IEEE, 2009-05-31)
Text en actes de congrés
Accés obertWhen the attachments of five legs in a Stewart platform are collinear on one side and coplanar on the other, the platform is said to contain a line-plane subassembly. This paper is devoted to the kinematics analysis of ... -
Motion planning for a novel reconfigurable parallel manipulator with lockable revolute joints
(2010)
Text en actes de congrés
Accés obertThis paper introduces a class of reconfigurable parallel robots consisting of a fixed base and a moving platform connected by serial chains having RRPS (Revolute-Revolute-Prismatic-Spherical) topology. Only the prismatic ... -
Motion planning for parallel robots with non-holonomic joints
(2012)
Text en actes de congrés
Accés obertDesigning a robot manipulator with fewer actuators than the dimension of its configuration space —to reduce bulk, weight and cost— becomes feasible by introducing mechanical elements that lead to non-holonomic constraints. ... -
New algebraic conditions for the identification of the relative position of two coplanar ellipses
(2017-05-01)
Article
Accés obertThe identification of the relative position of two real coplanar ellipses can be reduced to the identification of the nature of the singular conics in the pencil they define and, in general, their location with respect to ... -
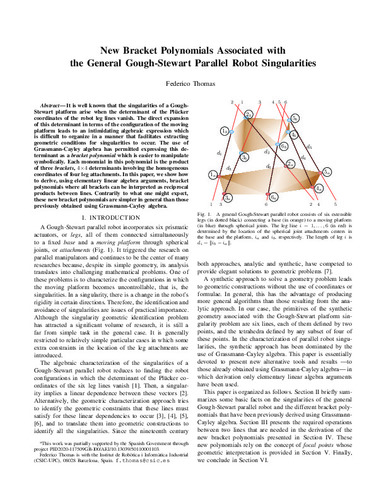
New bracket polynomials associated with the general gough-stewart parallel robot singularities
(2023)
Text en actes de congrés
Accés obertIt is well known that the singularities of a Gough-Stewart platform arise when the determinant of the Plücker coordinates of the robot leg lines vanish. The direct expansion of this determinant in terms of the configuration ... -
New geometric approaches to the analysis and design of Stewart-Gough platforms
(Institute of Electrical and Electronics Engineers (IEEE), 2014)
Article
Accés obertIn general, rearranging the legs of a Stewart-Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ... -
New geometric approaches to the singularity analysis of parallel platforms
(Escuela Superior de Ingenieros de la Universidad de Sevilla, 2011)
Text en actes de congrés
Accés obertIn general, rearranging the legs of a Stewart- Gough platform, i.e., changing the locations of its leg attachments, modifies the platform singularity locus in a rather unexpected way. Nevertheless, some leg rearrangements ...