Exploració per autor "Gomáriz Castro, Spartacus"

Ara es mostren els items 52-71 de 142
-
Fuzzy controller for the yaw and velocity control of the Guanay II AUV

(2015)
(2015)
Text en actes de congrés
Accés obert -
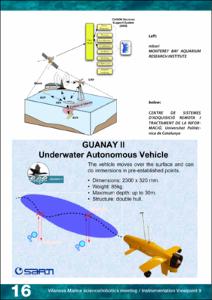
Guanay II underwater autonoumus vehicle
(2010-10-01)
Article
Accés obert -
Hydrodynamic model, simulation and linear control for cormoran-auv
(SARTI, 2011)
Article
Accés obert -
Hydrodynamic model, simulation and linear control for Cormoran-AUV
(2011)
Comunicació de congrés
Accés obertThis work shows the mathematic calculation for obtention of a Cormoran-AUV hydrodynamic model, it also shows a linar control design for a path tracking. The model has been simplified to three degrees of freedom of movement ... -
Hydrodynamic model, simulation and linear control for cormoran-auv

(Antoni Mànuel, 2011-11-01)
(Antoni Mànuel, 2011-11-01)
Article
Accés restringit per política de l'editorial -
Knowledge transfer in higher education institutions focused on entrepreneurial activities of electronic instrumentation
(MDPI AG, 2022-10-07)
Article
Accés obertAlthough society, governments and the business sector are increasingly demanding that Higher Academic Centers translate their innovative potential into products and services that affect society, little is known or done ... -
Latest contribution to guanay II
(Antoni Mànuel, 2013-10-01)
Article
Accés obert -
Latest contributions to guanay II
(SARTI, 2013)
Comunicació de congrés
Accés obert -
Latest contributions to Guanay II
(Antoni Mànuel, 2013-07-01)
Article
Accés obertThis work presents the last contributions incorporated into AUV Guanay II, these have been emerged after some test fields, tests in the swimming pool and in the ocean, such as Mar Menor and Mar Mediterrani. These ... -
Latest contributions to Guanay II
(2013)
Text en actes de congrés
Accés restringit per política de l'editorialThis work presents the last contributions incorporated into AUV Guanay II, these have been emerged after some test fields, tests in the swimming pool and in the ocean, such as Mar Menor and Mar Mediterrani. These ... -
Light and current generation system for measuring the behaviour of the Norway lobster
(2015-06-01)
Article
Accés obertPatterns of how the Norway lobster (Nephrops norvegicus L.) emerges from its burrow in relation to sea currents at different times of the day-night cycles is currently unknown. The degree of influence of these variables ... -
Limitations of linear control for Cormoran-AUV
(2012)
Text en actes de congrés
Accés restringit per política de l'editorialThis work shows a mathematic calculation of the hydrodynamic model for the Cormoran-AUV, together with a linear controller which is valid in a certain range of speeds. It also presents the navigation instruments needed to ... -
Linear control design for a path planning of AUV-Cormoran
(2010-12-01)
Article
Accés obertThis work shows a linearization for a AUV-Cormoran dynamic mathematical model with the aim of designing linear controllers for trajectory control. The model is developed under 3 degrees of freedom and the whole system ... -
Linear control design for a path planning og auv-cormoran
(SARTI, 2010)
Article
Accés obert -
Linear control of the yaw and rudder limitation for Cormoran AUV
(Antoni Mànuel, 2013-10-01)
Article
Accés obert -
Linear control of the yaw and rudder limitation for cormoran AUV
(SARTI, 2013)
Comunicació de congrés
Accés obert -
Linear control of the yaw and rudder limitations
(Antoni Mànuel, 2013-07-01)
Article
Accés obertThis work presents a detailed situation about the linear control design for the yaw in the Cormoran autonomous underwater vehicle (auv). The development includes the physical limitations of the rudder that involve more ... -
Linear control of the yaw and rudder limitations for Cormoran AUV
(2013)
Text en actes de congrés
Accés obertThis work presents a detailed situation about the linear control design for the yaw in the Cormoran autonomous underwater vehicle (AUV). The development includes the physical limitations of the rudder that involve more ... -
Mathematical model of the Guanay II AUV
(2013)
Text en actes de congrés
Accés restringit per política de l'editorialThis work presents a mathematical study to obtain the coefficients that define the dynamics of an autonomous underwater vehicle (AUV), the Guanay II vehicle, with 3 degrees of freedom. This dynamics is given by several ...