Exploració per tema "Kalman Filter"
Ara es mostren els items 11-14 de 14
-
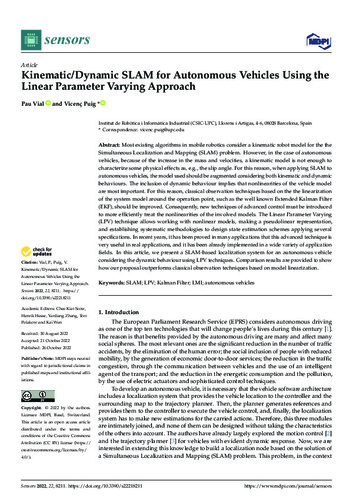
Kinematic/dynamic SLAM for autonomous vehicles using the linear parameter varying approach

(Multidisciplinary Digital Publishing Institute (MDPI), 2022-10-26)
(Multidisciplinary Digital Publishing Institute (MDPI), 2022-10-26)
Article
Accés obertMost existing algorithms in mobile robotics consider a kinematic robot model for the the Simultaneous Localization and Mapping (SLAM) problem. However, in the case of autonomous vehicles, because of the increase in the ... -
Mechanical sensor fault-tolerant controller in pmsm drive: experimental evaluation of observers and signal injection for position estimation

(2021-01-01)
(2021-01-01)
Article
Accés restringit per política de l'editorialThis paper presents the operating principle, results and conclusions for a FTC mechanical sensor that can guarantee continuity of operation on the whole speed range. This active FTC is based on analytical redundancy using ... -
Smartphone relative positioning using phone sensors
(Universitat Politècnica de Catalunya, 2016-06)
Treball Final de Grau
Accés obert -
Speed estimation of a Formula Student vehicle using Kalman Filters
(Universitat Politècnica de Catalunya, 2022-02-02)
Treball Final de Grau
Accés obertEstimation of longitudinal and lateral velocities, and yaw rate from the design of an 'Extended Kalman Filter'. It presents what the Student Formula is, the dynamic considerations that are taken into account, the sensors ...