Exploració per títol
Ara es mostren els items 50032-50051 de 245593
-
Control strategies used in lower limb exoskeletons for gait rehabilitation after brain injury: a systematic review and analysis of clinical effectiveness

(2023-02-19)
(2023-02-19)
Article
Accés obertBackground In the past decade, there has been substantial progress in the development of robotic controllers that specify how lower-limb exoskeletons should interact with brain-injured patients. However, it is still an ... -
Control strategy and predictive methods for performance and component lifetime enhancement in vehicle powertrain
(Universitat Politècnica de Catalunya, 2023-04-26)
Tesi
Accés obert(Enlish) In the past years, battery electric vehicles have been gaining market share. These vehicles are progressively seen as a viable option by customers of all kind. However, although manufacturers and research institutions ... -
Control strategy approach based on the operational results of a small capacity direct air -cooled LiBr -Water absorption chiller
(International Solar Energy Society, 2017)
Comunicació de congrés
Accés obertThe scope of this paper is to give a short overview of the state of the art regarding control strategies, identify the role of different operating conditions, and provide useful suggestions for the design and operation of ... -
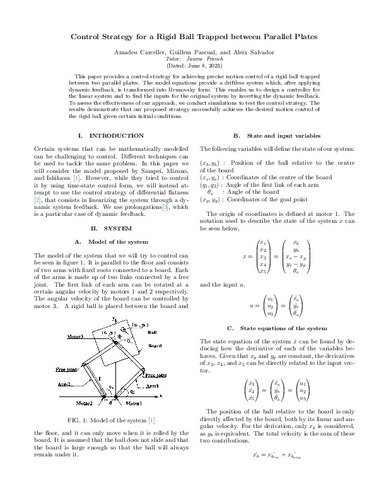
Control Strategy for a Rigid Ball Trapped between Parallel Plates
(Universitat Politècnica de Catalunya, 2023-06-08)
Treball d'assignatura
Accés obertThis paper provides a control strategy for achieving precise motion control of a rigid ball trapped between two parallel plates. The model equations provide a driftless system which, after applying dynamic feedback, is ... -
Control strategy for distribution generation inverters to maximize the voltage support in the lowest phase during voltage sags
(Institute of Electrical and Electronics Engineers (IEEE), 2017-08-07)
Article
Accés obertIEEE Voltage sags are considered one of the worst perturbations in power systems. Distributed generation power facilities are allowed to disconnect from the grid during grid faults whenever the voltage is below a certain ... -
Control strategy for grid-connected three-phase inverters during voltage sags to meet grid codes and to maximize power delivery capability
(2018-01-12)
Article
Accés obertInverter-based distributed generation plays a vital role in the stability and reliability of new power systems. Under voltage sags, these systems must remain connected to the electrical network according to the stringent ... -
Control strategy for the rotor side converter of a DFIG-WT under balanced voltage sag
(2009)
Comunicació de congrés
Accés obertThis paper proposes a new control technique to improve the fault-ride through capability of doubly fed induction generators (DFIG). In such generators the appearance of severe voltage sags at the coupling point make ... -
Control strategy of grid connected power converter based on virtual flux approach
(Universitat Politècnica de Catalunya, 2021-12-16)
Tesi
Accés obertDistributed Generation (DG) provides an alternative to the Centralized Generation (CG) by means of generating electricity near to the end user of power with the employment of small-scale technologies to produce electricity, ... -
Control strategy to balance operation of parallel connected legs of modular multilevel converters
(2013)
Text en actes de congrés
Accés obertConnecting legs of modular multilevel converters (MMCs) in parallel can assist an MMC-based high-voltage direct current (HVDC) to increase its current ratings and hence overall power handling capability. Consequently, each ... -
Control strategy to maximize the power capability of PV three-phase inverters during voltage sags
(2016-04-01)
Article
Accés obertUnder voltage sags, grid-tied photovoltaic inverters should remain connected to the grid according to low-voltage ride-through requirements. During such perturbations, it is interesting to exploit completely the distributed ... -
Control structures and optimal sensor/actuator allocation: application in active noise control
(Universitat Politècnica de Catalunya, 2010-03-05)
Tesi
Accés obertAquesta tesi presenta treball original i aplicat en l'àrea del control i la col·locació de sensors/actuadors (S/A) en sistemes de Control Actiu de Soroll (ANC). Primer, s'han aplicat tècniques de control i identificació ... -
Control System Design of a 3-Axis Gimbal
(Universitat Politècnica de Catalunya, 2020-07-10)
Projecte Final de Màster Oficial
Accés obertGimbals are precise devices used for orientation control in the 3D space. They can be used with mounted cameras to maintain horizontal orientation while being hand-held or even mounted on a helicopter, both of them, examples ... -
Control system for a ball on a platform
(Universitat Politècnica de Catalunya, 2014)
Treball d'assignatura
Accés obert -
Control system of a miniature 12 MeV race-track microtron
(2014)
Comunicació de congrés
Accés obertA simple control system has been developed for the commissioning of a compact 12 MeV race-track microtron which is under construction at the Technical University of Catalonia. It is of modular structure and is based ... -
Control system of the balloon experimental twin telescope for infrared interferometry
(Universitat Politècnica de Catalunya, 2017-09)
Projecte Final de Màster Oficial
Accés obert
Realitzat a/amb: Institut Supérieur de l'Aéronautique et de l'Espace / Goddard Space Flight CenterThe Balloon Experimental Twin Telescope for Infrared Interferometry (BETTII) is a far infrared telescope on a balloon-based platform that will validate the interferometry technique for future space telescopes. It is one ... -
Control systems and energy storage of large-area photovoltaic systems at Cranfield University
(Universitat Politècnica de Catalunya / Cranfield University, 2017-09)
Projecte Final de Màster Oficial
Accés obertAs solar photovoltaics share is continuously increasing in Europe, the aim of this project is to provide a customer-focused solution to achieve a more sustainable energy supply for Cranfield University by means of a ... -
Control T1

(Universitat Politècnica de Catalunya, 2020-11-13)
(Universitat Politècnica de Catalunya, 2020-11-13)
Examen
Accés restringit a la comunitat UPC -
Control tàctic per a emulació de supercondesador basat en font programable de dos quadrants
(Universitat Politècnica de Catalunya, 2018-10-25)
Treball Final de Grau
Accés obertEn el present projecte s’ha programat un simulador de supercondensador capaç d’imitar el comportament d’aquest dispositiu seguint una modelització normalitzada. Aquest simulador s’ha creat en un dels laboratoris de l’escola, ... -
Control teleoperado de robot Mitsubishi RV-M1

(Universitat Politècnica de Catalunya, 2006-06)
(Universitat Politècnica de Catalunya, 2006-06)
Projecte/Treball Final de Carrera
Accés restringit per decisió de l'autorEste proyecto define el proceso de diseño e impleme ntación de una interficie gráfica a través de un lenguaje d e programación de alto nivel (Visual Basic), con el f in de teleoperar a traves de ... -
Control teleoperado del robot RV-M1 mediante dispositivo móvil y Realidad Aumentada
(Universitat Politècnica de Catalunya, 2013)
Treball Final de Grau
Accés obertEl desarrollo de tecnologías emergentes como las tabletas está dotando a estos dispositivos de elementos de captura de imagen, visualización y comunicación Wi-fi o 3g y de la potencia de cálculo necesaria para poder ...